 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 產地類別 | 進口 | 應用領域 | 化工,石油,地礦,電子,交通 |
|---|
潯之漫智控技術(上海)有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產品,*,質量保證,價格優勢
西門子PLC,西門子觸摸屏,西門子數控系統,西門子軟啟動,西門子以太網
西門子電機,西門子變頻器,西門子直流調速器,西門子電線電纜
我公司大量現貨供應,價格優勢,*,德國*
 |
| 參考價 | 面議 |
更新時間:2020-08-26 17:17:40瀏覽次數:167
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
 |
|
南通SIEMENS西門子S7-1500PLC模塊代理商 南通SIEMENS西門子S7-1500PLC模塊代理商
潯之漫智控技術(上海)有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產品,*,質量保證,價格優勢
西門子PLC,西門子觸摸屏,西門子數控系統,西門子軟啟動,西門子以太網
西門子電機,西門子變頻器,西門子直流調速器,西門子電線電纜
我公司大量現貨供應,價格優勢,*,德國*
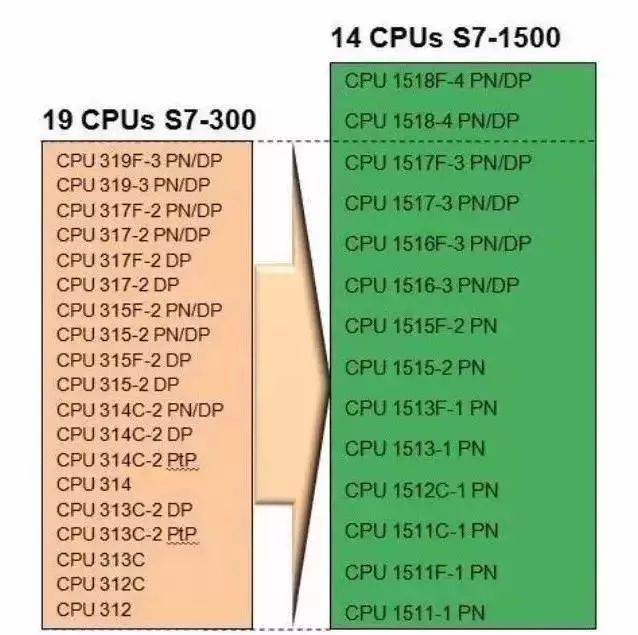
西門子S7-1500作為西門子迄今為止功能大、性價比高的PLC,得到了廣大客戶關注,今天與大家分享西門子西門子S7-1500與S7-300、S7-400相PK 的幾點優勢以及型譜對照。
.1
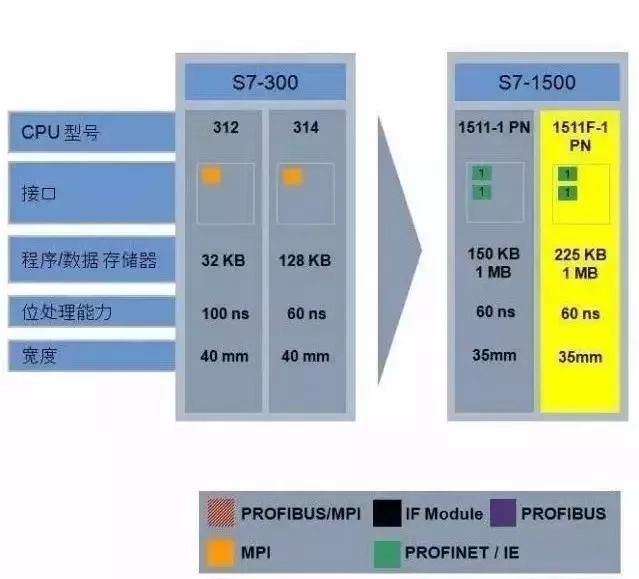
首先,它的外觀設計更人性化,選用時更容易被工程現場人員所接受。S7-1500模塊大小比S7-300稍大,機架類似于S7-300,前連接器安裝時具有接線位置,并提供專門的電源元件和屏蔽支架及線卡,使接線更方便,可靠性更高;尤其讓工程人員心動的是CPU上配置有LED顯示屏,可方便顯示CPU狀態和故障信息等。
.2
其次,從硬件方面來說,S7-1500PLC的處理速度更快,聯網能力更強,診斷能力和安全性更高,不僅可節省成本,提高生產效率,而且安全可靠,維護簡單方便,真正成為工廠客戶和現場維護人員的控制器。例如,相對于S7-300/400,S7-1500 PLC采用新型的背板總線技術,采用高波特率和高傳輸協議,使其信號處理速度更快;S7-1500所有CPU集成1-3個PROFINET接口,可實現低成本快速組態現場級通信和公司網絡通信,而S7-300/400PLC只有個別型號CPU才集成有PROFINET接口;S7-1500 PLC的模塊集成有診斷功能,診斷級別為通道級,無需進行額外編程,當發生故障時,可快速準確地識別受影響的通道,減少停機時間,這是S7-300/400PLC所*的。
3
S7-1500PLC的組態和編程效率時更容易被工程現場人員所接受。S7-1500模塊大小比S7-300稍大,機架類似于S7-300,前連接器安裝時具有接線位置,并提供專門的電源元件和屏蔽支架及線卡,使接線更方便,可靠性更高;尤其讓工程人員心動的是CPU上配置有LED顯示屏,可方便顯示CPU狀態和故障信息等。
.2
其次,從硬件方面來說,S7-1500PLC的處理速度更快,聯網能力更強,診斷能力
相對于S7-300/400PLC,S7-1500PLC支持的數據類型更廣泛。S7-1500PLC的基本數據類型的長度大到64位,而S7-300/400 PLC支持的基本數據類型長度大為32位;S7-1500PLC支持Pointer、Any和Variant三種類型指針,S7-300/400PLC只支持前兩種。這些特點,均使S7-1500PLC的編程更加靈活。
.5
另外,S7-1500 PLC無需使用其它模塊即可實現運動控制功能。通過PLCopen 技術,控制器可使用標準組件連接支持PROFIdrive 的各種驅動裝置;此外,S7-1500 PLC還支持所有CPU 變量的TRACE 功能,提高了調試效率,優化了驅動和控制器的性能。
小結
總之,S7-1500 PLC的功能不僅涵蓋了絕大多數S7-300/400PLC,而且有過之而無不及,適用范圍廣泛,加之其具有上述的優點,使其在今后的發展中,必將廣泛應用于各個工程領域之中。
S7-300與1500對應型號
哪里有賣 要多少錢 哪里有 哪里能買到 要在哪里買 在哪里有賣的 價格,參數,型號,哪家便宜,比較便宜,哪里有,銷售,訂貨號,多少錢?哪家價格好? 廠家,優點,包裝,用途,售后服務!哪里有賣 代理商 總代理商
為了達到 PID 自動/手動控制的無擾動切換,需要在編程時注意一些相關事項。下面分別就直接使用 PID 指令編程,和使用 PID 向導編程兩種情況作一介紹。
1.直接使用 PID 指令編程時的 PID 自動/手動無擾切換
直接使用 PID 指令塊編寫 PID 控制程序時,可以簡單地使用“調用/不調用”指令的方式控制自動/手動模式。因為 PID 指令本身已經具有實現無擾動切換的能力,此時在 PID 指令控制環節之外編程沒有多大必要。
PID 指令的 EN 輸入端使能(為“1”)時,我們認為是自動控制模式;EN 輸入端未使能(為“0”)時,我們認為是手動控制模式。
PID 指令本身有一個“能流歷史狀態位”,以記錄指令的狀態切換。在 EN 端從“0”變為”“1”時,PID 指令認為這是從“手動”模式向“自動”模式切換。PID 指令此時會自動執行一系列動作,以配合無擾動切換:
使設定值等于當前反饋值可以避免出現偏差,使之不存在調整的要求;當然如果有工藝要求,也可以后續調整設定值。其他的動作都是為了使 PID 在后續的操作中不改變輸出的值。
在編程時要注意:
2.使用 PID 向導編程時的 PID 自動/手動無擾切換
使用 PID 指令向導編程時,指令向導會自動調用 PID 指令,并且編寫外圍的控制變量標準化換算、定時采樣等功能。用戶在使用 PID 指令向導時,需要在用戶程序中用 SM0.0 調用指令向導生成的子程序(如 PIDx_INIT 子程序)。PID 向導可以生成帶自動/手動切換功能的子程序,這個子程序使用一個數字量點為“1”、“0”的狀態來控制是否投入 PID 自動控制。
到目前為止(STEP 7-Micro/WIN V4.0 SP5),使用 PID 向導生成的子程序時,由于用戶程序不能直接使用 PID 指令,它的無擾切換能力因為隔了外殼子程序,所以受到了局限。如果對無擾切換要求比較嚴格,需要另外編一些程序加以處理。
考察如下 PID 控制子程序。

圖 4.1.1. PID 向導生成的指令
圖中:
要實現無擾動切換,必須:
為此,可編寫類似下圖所示的程序,放在 PID 控制子程序之前:

4.1.2. 無擾切換處理程序
圖中:
上述程序中的 Scale_I_to_R 就是量程變換指令庫中的子程序。這是為了解決過程反饋與設定值之間的換算問題。用戶也可以自己編程換算,或者根據反饋與給定的取值范圍決定是否需要換算。
此段程序適用于 STEP 7-Micro/WIN V4.0 SP5 及以前版本,僅供參考,如果在實際項目中使用,上述程序未必一定適用。用戶需要根據實際工藝決定自己的編程思路。
建議PID參數調節步驟:
(1)前提條件:反饋信號是否穩定,執行機構是否正常以及控制器的正反作用。(確保PID在自動模式下)
(2)積分時間設置為無窮大INF(或9999.9),此時積分作用近似為0;將微分時間設置為0.0,此時微分作用為0 。然后開始調節比例作用,逐步增大比例增益
(3)當過程變量達到給定值且在給定值上下波動,將調好的比例系數調整到50%~80%后,由大到小減小積分時間,直到過程值與設定值相等或無限接近
PID調節有很多種方法,以上僅是建議步驟,也并未考慮微分作用,客戶依據實際情況靈活調節,同時可以參考反饋與給定的曲線圖
用戶經常會遇到這樣的問題:嘗試了很多組PID參數,都無法滿足控制器的要求, 此時需要考慮PID的采樣時間是否適合當前系統。采樣時間就是對反饋進行采樣的間隔。短于采樣時間間隔的信號變化是不能測量到的。采樣時間過短,兩次實測值的變化量太小,也不合適,而且增加PLC的運算負擔;采樣間隔過長,將會引起有用信號的丟失,使系統品質變差,不能滿足擾動變化比較快、或者速度響應要求高的場合。除此以外,也有可能是系統自身的問題,無法調節到穩定,例如, 不規律的干擾,或者反饋信號不穩定。
1. PID輸出總是輸出很大的值,并在這一區間內調節變化。

產生原因:增益(Gain)值太高
PID掃描時間(sample time)太長(對于快速響應PID的回路)
解決方法:降低增益(Gain)值并且/或選擇短一些的掃描時間
2. 過程變量超過設定值很多(超調很大)

產生原因:積分時間(Integral time)可能太高。
解決方法:降低積分時間 3. 得到一個非常不穩定的PID。

解決方法:
如何獲取一組合適的參數,實現快速并穩定的PID控制?
PID調節過程中,用戶通常需要做多次的參數調節才能獲得的控制效果。從下面反饋(過程變量)與給定之間的曲線圖中,可以看到黃色曲線較理想。用戶可以將調節的PID反饋與給定曲線與下圖中對比,并修改相關參數(但是因為現場情況不一樣,用戶還需具體問題具體對待,下圖中的建議僅供參考:

圖 4.3.4 反饋與給定曲線
1.超調過大,減小比例,增大積分時間
2.迅速變化,存在小超調
3.實際值緩慢接近設定值,并且無超調的達到設定值
4.增益系數太小和/或微分時間太長
5.益系數太小和/或積分時間太長
沒有采用積分控制時,為何反饋達不到給定?
這是必然的。因為積分控制的作用在于消除純比例調節系統固有的“靜差”。沒有積分控制的比例控制系統中,沒有偏差就沒有輸出量,沒有輸出就不能維持反饋值與給定值相等。所以永遠不能做到沒有偏差。
對于某個具體的PID控制項目,是否可能事先得知比較合適的參數?有沒有相關的經驗數據?
雖然有理論上計算PID參數的方法,但由于閉環調節的影響因素很多而不能全部在數學地描述,計算出的數值往往沒有什么實際意義。因此,除了實際調試獲得參數外,沒有什么可用的經驗參數值存在。甚至對于兩套看似一樣的系統,都可能通過實際調試得到*不同的參數值。
PID控制不穩定怎么辦?如何調試PID?
閉環系統的調試,首先應當做開環測試。所謂開環,就是在PID調節器不投入工作的時候,觀察:
可以試著給出一些比較保守的PID參數,比如放大倍數(增益)不要太大,可以小于1,積分時間不要太短,以免引起振蕩。在這個基礎上,可以直接投入運行觀察反饋的波形變化。給出一個階躍給定,觀察系統的響應是的方法。
如果反饋達到給定值之后,歷經多次振蕩才能穩定或者根本不穩定,應該考慮是否增益過大、積分時間過短;如果反饋遲遲不能跟隨給定,上升速度很慢,應該考慮是否增益過小、積分時間過長……
總之,PID參數的調試是一個綜合的、互相影響的過程,實際調試過程中的多次嘗試是非常重要的步驟,也是必須的。
S7-200 中使用的自整定算法是基于 K.J.?str?m 和 T. H?gglund 在 1984 年提出的延時反饋算法。經過這二十年,繼電反饋算法已被應用于工業控制的各個領域。可以使用操作員面板中的用戶程序或者 PID 整定控制面板來啟動自整定功能。在同一時間,不僅僅只有一個 PID 回路可以進行自整定,如果需要的話,所有 8 個 PID 回路可以同時進行自整定。PID自整定算法向您推薦增益值、積分時間值和微分時間值。您也可以為您的調節回路選擇快速響應、中速響應、慢速響應或者極慢速響應等調節類型。
啟動自整定先決條件:
要進行自整定的回路必須處于自動模式
在開始PID自整定調整前,整個PID控制回路必須工作在相對穩定的狀態(穩定的PID是指過程變量接近設定值,輸出不會不規則的變化,且回路的輸出值在控制范圍中心附近變化。)
理想狀態下,自整定啟動時,回路輸出值應該在控制范圍中心附近。 自整定過程在回路的輸出中加入一些小的階躍變化,使得控制過程產生振蕩。 如果回路輸出接近其控制范圍的任一限值,自整定過程引入的階躍變化可能導致輸出值超出小或大范圍限值。 如果發生這種情況,可能會生成自整定錯誤條件,當然也會使推薦值并非化。
為什么啟動自整定之前,需要PID控制回路工作在相對穩定狀態?
啟動自整定后,回路計算自滯后序列時,不能執行正常的 PID 計算,此時回路輸出時一個定值,不會根據偏差變化。 因此,在啟動自整定序列之前,控制過程應處于穩定狀態。 這樣可以得到更好的滯后值結果,同時也可以保證自滯后序列期間控制過程不會失控。
5.2. PID自整定參數介紹
S7-200 中的 PID自整定參數是回路表40-80字節,見下圖:

PID擴展回路表
a. AT控制(ACNTL): 啟動/中止自整定

b.AT狀態(ASTAT):自整定的輸出狀態字節,PID控制面板自整定時的相關狀態也是根據由該字節判斷。

圖 5.2.3. PID自整定AT狀態字節
c.AT結果(ARES):PID自整定結果,需要注意,啟動PID自整定之前需要確保該字節0位為0,尤其是自己編程啟動自整定,可能需要手動設置為0。

 |