西門子6ES7253-1AA22-0XA0 西門子6ES7253-1AA22-0XA0
潯之漫 智控技術(shù)有限公司 上海詩慕自動化設(shè)備有限公司
本公司銷售西門子自動化產(chǎn)品,*,質(zhì)量保證,價格優(yōu)勢
西門子PLC,西門子觸摸屏,西門子數(shù)控系統(tǒng),西門子軟啟動,西門子以太網(wǎng)
西門子電機(jī),西門子變頻器,西門子直流調(diào)速器,西門子電線電纜
我公司大量現(xiàn)貨供應(yīng),價格優(yōu)勢,*,德國*
PTO向?qū)б浦?/p>
S7-200 PTO向?qū)б浦仓?S7-200 SMART 運動控制,移植時需要在 S7-200 SMART 中重新運行運動控制向?qū)Ь幊獭?/p>
S7-200 SMART 運動控制向?qū)У臏y量系統(tǒng)選擇相對脈沖,如圖1所示:

圖1. 選擇測量系統(tǒng)
S7-200 SMART 運動控制向?qū)У姆较蚩刂聘鶕?jù)實際情況可以選擇“單相(1個輸出)”或者“單相(2個輸出)”,“單相(2個輸出)”有方向控制,如圖2所示:

圖2. 選擇方向控制
CTRL 指令移植
PTOx_CTRL 指令由 AXISx_CTRL 指令替換,如圖3所示:
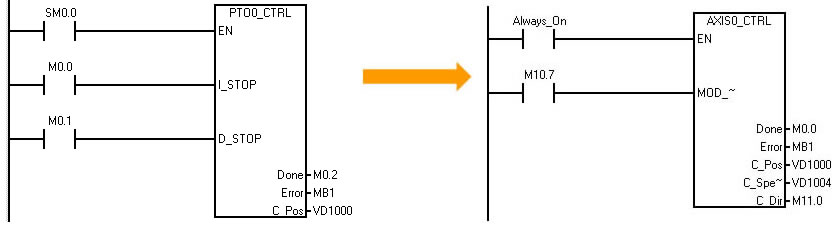
圖3. CTRL指令移植
1、I_STOP參數(shù),在S7-200 SMART運動控制向?qū)е懈鶕?jù)實際情況啟用LMT+(正限位)、LMT-(負(fù)限位)、STP(停止點)DI點,選擇響應(yīng)為“立即停止”,如圖4所示。如果立即停止為內(nèi)部變量,可以將該內(nèi)部變量通過DO點控制DI點實現(xiàn)。

圖4. 立即停止
2、D_STOP參數(shù),在S7-200 SMART運動控制向?qū)е懈鶕?jù)實際情況啟用LMT+(正限位)、LMT-(負(fù)限位)、STP(停止點)DI點,選擇響應(yīng)為“減速停止”,如圖5所示。如果減速停止為內(nèi)部變量,可以使用MOD_EN參數(shù)替換。

圖5. 減速停止
MAN 指令移植
PTOx_MAN 指令由 AXISx_MAN 指令替換,如圖6所示:

圖6. MAN指令移植
1、同一時刻僅能啟用RUN、JOG_P或JOG_N中的一個命令;
2、如果改變方向需先改變Dir參數(shù)再啟用RUN,Dir=0時為正向。
RUN 指令移植
PTOx_RUN指令由AXISx_RUN指令替換,如圖7所示:

圖7. RUN指令移植
1、S7-200多25個包絡(luò),每個包絡(luò)多29步,S7-200 SMART 多32個包絡(luò),每個包絡(luò)多16步;
2、S7-200包絡(luò)定義為“單速連續(xù)旋轉(zhuǎn)”且使用PTOx_ADV指令后繼續(xù)發(fā)送脈沖停止功能,在S7-200 SMART 可以使用RPS輸入點停止,可以通過DO點控制RPS輸入點實現(xiàn),如圖8所示:

圖8. PTOx_ADV 功能移植
LDPOS 指令移植
PTOx_LDPOS 指令由 AXISx_LDPOS 指令替換,如圖9所示:

圖9. PTOx_LDPOS 指令移植
MAP庫移植
S7-200 MAP 庫移植至 S7-200 SMART 運動控制,移植時需要在 S7-200 SMART 中通過運動控制向?qū)Ь幊獭?/p>
測量系統(tǒng)移植
1、如果 MAP 庫使用相對脈沖,S7-200 SMART 運動控制向?qū)У臏y量系統(tǒng)選擇相對脈沖,如圖1:

圖1. 選擇測量系統(tǒng)
2、S7-200 SMART 運動控制向?qū)У姆较蚩刂聘鶕?jù)實際情況可以選擇“單相(1個輸出)”或者“單相(2個輸出)”,如圖2:

圖2. 選擇方向控制
3、如果 MAP 庫使用工程量,S7-200 SMART 運動控制向?qū)У臏y量系統(tǒng)選擇工程單位,如圖3所示:

圖3. Scale_EU_Pulse指令移植
4、大速度和啟動/停止速度在S7-200 SMART運動控制向?qū)е性O(shè)置,如圖4所示:

圖4. 大速度
5、加減速時間在 S7-200 SMART 運動控制向?qū)е性O(shè)置,如圖5所示:

圖5. 加減速時間
CTRL指令移植
Q0_X_CTRL指令由AXISx_CTRL指令替換,如圖6所示:

圖6. CTRL指令移植
啟動/停止速度、大速度、加減速時間、正限位和負(fù)限位,在S7-200 SMART 運動控制向?qū)е性O(shè)置。
MoveVelocity指令移植
1、使用 Q0_X_MoveVelocity 指令,在運動過程中修改速度,由 AXISx_MAN 指令替換,如圖7所示:

圖7. MoveVelocity指令移植
2、使用 Q0_X_MoveVelocity 指令,在運動過程中不需要修改速度,由 AXISx_MAN 指令或者 AXISx_GOTO 指令(正向模式2,反向模式3)替換,如圖8所示:

圖8. MoveVelocity 指令移植
MoveAbsolute 指令移植
Q0_X_MoveAbsolute 指令由 AXISx_GOTO 指令(模式0)替換,如圖9所示:

圖9. MoveAbsolute指令移植
MoveRelative 指令移植
Q0_X_MoveRelative 指令由 AXISx_GOTO 指令(模式1)替換,如圖10所示:

圖10. MoveRelative 指令移植
Q0_X_MoveRelative 指令的方向 Direction(0=反向、1=正向),AXISx_GOTO 指令的 Pos 正數(shù)為正向、負(fù)數(shù)為反向。
Home 指令移植
Q0_X_Home 指令由 AXISx_RSEEK 指令替換,如圖11所示:

圖11. Q0_X_Home 指令移植
1、Q0_X_Home 指令的 Start_Dir、Final_Dir、Homing_Slow_Spd、Homing_Fast_Spd 需要在 S7-200 SMART 運動控制向?qū)е性O(shè)置,如圖12所示:

圖12. S7-200 SMART 運動控制向?qū)Х较颉⑺俣仍O(shè)置
2、Q0_X_Home 指令的 bbbbbbbb 需要在 S7-200 SMART 運動控制向?qū)е性O(shè)置參考點偏移量,如圖13所示:

圖13. S7-200 SMART 運動控制向?qū)гO(shè)置參考點偏移量
3、需要在 S7-200 SMART 運動控制向?qū)е性O(shè)置搜索順序為1,如圖14所示:

圖14. S7-200 SMART 運動控制向?qū)гO(shè)置搜索順序
LDPOS 指令移植
Q0_X_LoadPos 指令由 AXISx_LDPOS 指令替換,如圖15:

EM253移植
S7-200 EM253 移植至 S7-200 SMART 時,硬件差異很大(如表1),因此移植時伺服驅(qū)動器需要與 S7-200 SMART 匹配。
表1.S7-200 EM253與S7-200 SMART硬件差異
| 序號 | 內(nèi)容 | EM253 | S7-200 SMART |
| 1 | 電壓等級 | 5V、12V、24V及5V差分 | 24V |
| 2 | 頻率 |
| |
指令移植
S7-200 EM253向?qū)б浦仓罶7-200 SMART運動控制,移植時需要在S7-200 SMART中重新運行向?qū)Ь幊獭?/p>
EM253的運動控制指令與S7-200 SMART運動控制指令功能區(qū)別很小,按照表2對應(yīng)關(guān)系移植:
表2.S7-200 EM253移植至S7-200 SMART指令對應(yīng)關(guān)系
| 序號 | EM253 | S7-200 SMART |
| 1 | POSx_CTRL | AXISx_CTRL |
| 2 | POSx_MAN | AXISx_MAN |
| 3 | POSx_GOTO | AXISx_GOTO |
| 4 | POSx_RUN | AXISx_RUN |
| 5 | POSx_RSEEK | AXISx_RSEEK |
| 6 | POSx_LDOFF | AXISx_LDOFF |
| 7 | POSx_LDPOS | AXISx_LDPOS |
| 8 | POSx_SRATE | AXISx_SRATE |
| 9 | POSx_DIS | AXISx_DIS |
| 10 | POSx_CLR | 無相關(guān)指令,使用Q點編程50ms脈沖實現(xiàn) |
| 11 | POSx_CFG | AXISx_CFG |
PWM移植
S7-200 PWM向?qū)б浦仓罶7-200 SMART PWM,移植時需要在S7-200 SMART中重新運行PWM向?qū)Ь幊獭?/p>
PWM向?qū)б浦?/p>
S7-200 PWM 向?qū)б浦仓罶7-200 SMART PWM,移植時需要在 S7-200 SMART中 重新運行PWM向?qū)Ь幊蹋鐖D1所示:

圖1. PWM向?qū)б浦?/p>
在S7-200 SMART 中重新調(diào)用向?qū)傻?PWMx_RUN 子程序,如圖2所示:

 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)













