 化工儀器網
化工儀器網










詳細介紹
軀體運動神經調控分析系統市場價格
神經調節機制作如下基礎性論述。
人體重要的運動反射—牽張反射
人體中存在神經支配的骨骼肌在受到外力牽拉時所能引起的受牽拉的同一塊肌肉的反射活動在生理學中被稱作牽張反射。牽張反射目前被分為兩種類型,既腱反射和肌緊張兩種。
2.1 腱反射是指快速牽拉肌腱時所發生的牽張反射 例如,叩擊膝關節下的股四頭肌肌腱,股四頭肌既發生一次收縮,既為膝反射;又如,叩擊跟腱使小腿腓腸肌發生一次收縮的牽張反射被稱為跟腱反射;而肘反射是指叩擊肱二頭肌引起的肘部屈曲的牽張反射。一般認為腱反射的傳入纖維直徑較粗(12~20μm),其傳導速度也較快(90m/s以上),其反射的潛伏期較短約0.7ms,故只能夠一次突觸接替的時間延擱,因此腱反射是單突觸反射。腱反射的感受器是肌梭,中樞在脊髓前角,效應器主要是肌肉收縮較快的快肌纖維成分,故有時又被稱之為位相性牽張反射。
2.2 另一種重要反射類型—肌緊張 肌緊張是維持人體正常姿勢基本的反射活動,是姿勢反射的基礎。例如,人體取直立姿勢時,由于重力的作用。其頭部將向前傾,胸和腰將不能挺直,髖關節和膝關節也將屈曲,但由于骶棘肌以及頸部某些肌肉群及下肢的伸肌群等的肌緊張加強,所以人體就能抬頭、挺胸、伸腰、直腿,從而保持直立的姿勢。肌緊張的感受器也是肌梭,但中樞的突觸接替有可能不止一個,而是多個,可能為多突觸反射,效應器主要是肌肉收縮較慢的慢肌纖維成分。由于肌緊張的反射收縮力量并不大,只是抵抗肌肉被牽拉,表現為同一肌肉的不同運動單位進行交替性收縮,而不是同步收縮,不表現出明顯的動作,所以肌緊張能持久地進行而不易發生疲勞。
牽張反射主要是使受牽拉的肌肉發生收縮,但同一關節的協同肌也能發生興奮,而同一關節的拮抗肌則受到抑制(交互抑制),但并不影響其他關節上的肌肉運動。雖然屈肌和伸肌都產生牽張反射但脊髓的牽張反射主要表現在伸肌。屈肌的牽張反射不明顯,主要表現為它的拮抗肌(既伸肌)受到了抑制。牽張反射,尤其是肌緊張的主要生理意義在維持站立姿勢,因此伸肌比屈肌的牽張反射明顯更符合人體生理情況。牽張反射的基本反射弧較為簡單,但整體上牽張反射受高位中樞調節,而且可以建立條件反射。腱反射的減弱或消退,常提示反射弧的傳入、傳出通路或脊髓反射中樞的損害或中斷;而腱反射的亢進在臨床中常提示有高位中樞病變,如高位節癱。因此,臨床上常常通過檢查腱反射來了解神經系統的功能狀態。
軀體運動神經調控分析系統市場價格
軀體運動神經調控分析系統, ,
神經力學實驗裝置系統(神經力學科研裝置)
——人體運動的多尺度神經力學模型系統
外骨骼模型的控制分析系統,神經肌肉控制人體運動系統,運動動作腦電圖分析系統,神經與肌肉連接分析系統,人體運動的多尺度神經力學系統,電動踝-足矯形器的動態一致模型,肌肉激活募集分析系統,神經肌肉力學研究模型,運動動作sEMG分析系統,大腦如何控制運動分析系統
系統功能概述:
研究人體運動源于神經、肌肉和骨骼系統之間的協調互動。檢查骨骼、肌肉和神經系統的綜合作用,以及它們如何相互作用以產生完成運動任務所需的運動。
旨在了解運動及其與大腦的關系。結合肌肉、感覺器官、大腦中的模式發生器和中樞神經系統本身的努力來解釋運動的領域。
應用包括了解運動神經肌肉和肌肉骨骼功能的潛在機制,對復合神經肌肉骨骼系統中神經機械相互作用等緩解健康問題以及設計和控制機器人系統。
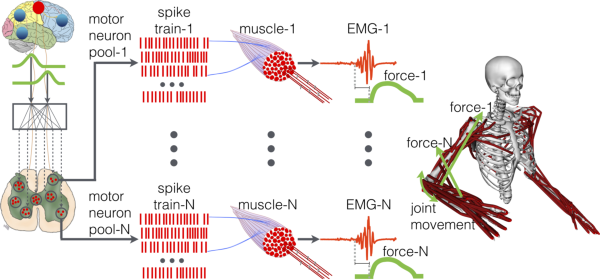
該設備開發綜合多尺度建模方法,包括肌肉、骨骼和神經模型。使用的高密度 (HD-EMG) 與盲源分離相結合,將干擾 HD-EMG 信號識別到由同時控制許多
肌肉纖維的脊髓運動神經元放電的尖峰列車集合中。開發的由體內運動神經元放電驅動的多尺度肌肉骨骼建模公式,用于計算所得肌肉骨骼力的高保真估計。
這將使神經控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經肌肉/骨科疾病的病因、診斷和治療開辟新的途徑。
●完整人體運動體內運動、動作、機械力協調互動的分析系統,全面、系統化的數據檢測分析
●神經、肌肉和骨骼系統之間控制、協調、互動的分析評估
●骨骼、肌肉和神經系統綜合作用運動、動作的實時捕捉、檢查分析
●研究人體、人機運動動作及其與大腦、骨骼、肌肉之間的關系
●結合肌肉、感覺器官、大腦中的模式發生器和中樞神經系統本身解釋運動的領域
●研究運動神經肌肉和肌肉骨骼功能的潛在機制
●復合神經肌肉骨骼系統中神經機械相互作用等健康問題
●其他神經與人體所有運動、動作關聯問題
●確保組件間協同工作,為您*的研究需求提供全面、系統化、高質量捕捉與數據分析


神經運動控制分析系統,肌肉募集分析系統,運動協調控制神經模型系統,神經肌肉控制實驗設備,機體運動神經控制調節分析系統,運動控制與運動再學習,神經肌肉骨骼模型科研裝置,神經力學裝置,人體-外骨骼物理交互和基于模型的控制,運動多尺度神經力學實驗
系統特點:
一套一站式交鑰匙 3-D運動實時捕捉分析系統,旨在同步收集來自各種運動跟蹤器、EMG()、測力臺、手傳感器、EEG腦電圖、
定量腦電圖(quantitative EEG, qEEG)系統、數字視頻、事件標記和其他模擬設備、虛擬現實和觸覺設備的數據。
從豐富的分析工具集合中生成的數據可立即通過所有數據輸出的圖形顯示進行回放。 令人驚嘆的 3-D 計算機渲染對象動畫可以被視為骨架、簡筆畫或人形。集成使用市場上
廣泛的硬件實現對人體運動、大腦活動、眼球運動、肌肉募集和作用在身體上的外力的實時測量。
確保您選擇的組件協同工作,為您*的研究需求提供全面、系統化、高質量的數據。 數據*同步,與其他組件準確定位,并通過的計算機
渲染和圖形顯示實時呈現。 數據輸出包括所有運動學和動力學數據,包括關節力和力矩,以及從虛擬環境同步接收的用戶定義變量。 數據可在不需要編程的直觀下拉菜單中使用。
用戶編寫的腳本可以定義額外的數據和事件,并與統計模塊一起擴展該系統的固有功能。


允許用戶對三維肌肉骨骼圖形進行建模、動畫制作和測量以及神經控制協調。肌肉骨骼模型包括骨骼、肌肉、關節、韌帶和其他可由用戶通過圖形界面操縱的物理結構的表示。這些模型可以用來模擬任何數量的運動,如步行、騎自行車、跑步、跳躍、舉重和投擲。
實時 EMG 驅動的肌肉骨骼建模,于神經肌肉控制人體運動,運動神經力學模型,運動動作腦電圖分析系統,神經力學模型裝置,驅動的肌肉骨骼建模裝置系統,運動控制與運動再學習,刺激肌肉力量調節分析系統,人體運動神經力學系統,人體運動協調性評估分析系統
動作捕捉導入器–可以導入運動捕捉文件(C3D、TRB、TRC)進行回放和測量。它還可以從運動分析系統實時導入數據,并在捕獲數據時制作三維模型的動畫。
步態報告–運動報告工具創建一組運動的報告,包括步態。這些報告包含平均值、標準偏差和數據比較。對于步態報告,該工具計算步態事件,并自動將記錄的運動分為左右步幅。包含格式化的Excel圖表,以便于比較或研究數據。
腳本–腳本工具使用命令執行腳本,以加載模型和運動數據、執行動態模擬以及創建繪圖和報告。腳本也可用于保存工具設置,以便下次啟動或加載特定模型時恢復這些設置。
模型縮放–縮放實用程序會根據靜態運動捕捉試驗的測量結果,自動縮放通用模型以匹配任何尺寸的個體。包括肌肉路徑在內的所有模型組件都會隨著身體部分進行縮放。
肌肉包裹–用戶可以交互定義球體、橢圓體、圓柱體和鳥居,以供肌肉肌腱執行器包裹。肌肉路徑會在這些對象上自動計算,從而可以為包裹的肌肉計算肌肉長度、力量和運動手臂。
現場直播–只要肌肉的任何屬性發生變化,肌肉屬性的實時圖就會更新。這允許用戶立即觀察移動附著點、纏繞對象或任何其他屬性對肌肉長度、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,如脛骨扭轉或股骨前傾。
視頻導入/導出–運動數據視頻可以在運動動畫期間導入并在虛擬屏幕上播放。這使得模型動畫和實時視頻的比較變得容易。視頻也可以從模型窗口導出到AVI文件。
外皮–蒙皮是指鏈接到一個或多個身體部分的三維多邊形表面。通過鏈接到一個或多個身體部分,可以使皮膚在關節移動時變形。皮膚可用于表示解剖皮膚、肌肉表面、韌帶或其他表面。它們也可以用紋理貼圖渲染,以增強真實感。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易。該系統現在支持“拖放",可以輕松加載模型或運動數據,并執行添加骨骼或運行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,OpenSim是一個開源軟件系統,允許用戶創建和測量運動的動態模擬。OpenSim通過提供額外的動力學特性,包括殘余減少和計算肌肉控制,擴展了該系統的功能。OpenSim可以導入和導出該系統模型,允許用戶利用這兩個應用程序的功能。
力量和調節
提供用于動作捕捉的硬件和軟件的交鑰匙包,根據力量和調理人士的需求量身定制。


之運動平衡評估介紹:
基于假肢模型的肌電控制,運動多尺度神經力學模型,運動動作sEMG分析系統,神經肌肉骨骼模型科研裝置,身體控制平衡能力動作鍛煉,神經動力學模型裝置,neuromechanics-system,運動控制和生物力學,肌肉骨骼損傷生物力學實驗裝置,神經控制協調人體行為分析系統
分析和跟蹤受試者生物力學能力的變化,監測肌肉募集并分析感覺組織
特點:
1、立即評估
輸出同步壓力中心和運動學數據,以及用戶定義的測量值,包括局部和全局大/小搖擺和運動范圍。 實時提供此信息,以便為您的受試者提供即時的表現反饋。
2、實時生物反饋
通過音調和視覺提示提供實時生物反饋,以跟蹤和擴展任何身體部位的運動范圍。 監測肌肉募集的時間和存在以優化平衡策略。
3、集成外圍數據
通過同步腦電圖、眼動追蹤、數字參考視頻、虛擬現實和擴展運動學和地面力數據收集,以調查有助于平衡和姿勢控制的所有神經肌肉因素。 可以隨時間添加硬件以擴展功能。 所有數據源都可以同步收集,也可以通過單擊按鈕單獨收集。
4、分析
利用 該系統 的非線性分析功能,例如熵和分形維數,可以更完整地評估穩定性。
5、動態跑步機控制
使用 該系統 的雙向實時接口控制 Bertec 的儀表跑步機,以控制皮帶速度。 根據運動學數據修改皮帶速度以進行自定步調步行和跑步,或在數據收集期間應用用戶定義的擾動以評估姿勢控制


之肌肉建模分析介紹:集成肌肉模型采集的運動捕捉數據分析肌肉力量和力矩。
分析出被測者的肌肉纖維類型、狀態、適應潛力等指標從而評判被測者適合哪種類型的運動;還可以準確測量被測肌肉的疲勞度,監測肌肉疲勞恢復情況所需要的時間,從而科學合理制定訓練計劃和強度;并從測試中可分析得出,左右兩側肌肉是否對稱,狀態是否正常,在運動員訓練或是比賽前,規避受傷風險,不會給測試者帶來任何傷害和影響,還可在受傷后直接選取受傷部位得到受傷肌肉的具體信息,根據信息,可以很準確判斷肌肉受傷情況并制定康復計劃流程,幫助縮短康復所需要的時間


驅動的肌肉骨骼模型,神經肌肉控制人體運動分析系統,神經控制協調運動動作,人類感覺運動系統,骨骼肌力學模型系統,運動協調能力分析系統,實時神經機械建模系統裝置,人體運動動作控制分析系統,關節活動度與運動協調性運動功能評估,肌肉骨骼損傷生物力學實驗系統





建模變得容易
直接從從標記、I M U、電磁跟蹤器和 C 3 D 文件收集的運動捕捉數據中生成肌肉模型。
用戶自定義 & 導入模型
導入 O p e n S i m 模型,定義您自己的模型或修改現有模型。 使用主題設置中的數據使您的模型特定于主題
數據分析和可視化
對肌肉應用顏色和不透明度以可視化募集水平。繪制單個肌肉力量以了解單個肌肉的相對貢獻和排序。 比較肌肉力矩和外部關節力矩。 通過比較內部肌肉力矩與總關節力矩的總和來分析優化的質量。
靈活堅固
使用您現有的收集方法。 該系統自動將在該系統中收集的運動學和動力學數據鏈接到肌肉模型靜態優化程序。 優化力或激活。
允許用戶對三維肌肉骨骼圖形進行建模、動畫制作和測量以及神經控制協調。肌肉骨骼模型包括骨骼、肌肉、關節、韌帶和其他可由用戶通過圖形界面操縱的物理結構的表示。這些模型可以用來模擬任何數量的運動,如步行、騎自行車、跑步、跳躍、舉重和投擲。
動作捕捉導入器–可以導入運動捕捉文件(C3D、TRB、TRC)進行回放和測量。它還可以從運動分析系統實時導入數據,并在捕獲數據時制作三維模型的動畫。
步態報告–運動報告工具創建一組運動的報告,包括步態。這些報告包含平均值、標準偏差和數據比較。對于步態報告,該工具計算步態事件,并自動將記錄的運動分為左右步幅。包含格式化的Excel圖表,以便于比較或研究數據。
腳本–腳本工具使用命令執行腳本,以加載模型和運動數據、執行動態模擬以及創建繪圖和報告。腳本也可用于保存工具設置,以便下次啟動或加載特定模型時恢復這些設置。
模型縮放–縮放實用程序會根據靜態運動捕捉試驗的測量結果,自動縮放通用模型以匹配任何尺寸的個體。包括肌肉路徑在內的所有模型組件都會隨著身體部分進行縮放。
肌肉包裹–用戶可以交互定義球體、橢圓體、圓柱體和鳥居,以供肌肉肌腱執行器包裹。肌肉路徑會在這些對象上自動計算,從而可以為包裹的肌肉計算肌肉長度、力量和運動手臂。
現場直播–只要肌肉的任何屬性發生變化,肌肉屬性的實時圖就會更新。這允許用戶立即觀察移動附著點、纏繞對象或任何其他屬性對肌肉長度、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,如脛骨扭轉或股骨前傾。
視頻導入/導出–運動數據視頻可以在運動動畫期間導入并在虛擬屏幕上播放。這使得模型動畫和實時視頻的比較變得容易。視頻也可以從模型窗口導出到AVI文件。
外皮–蒙皮是指鏈接到一個或多個身體部分的三維多邊形表面。通過鏈接到一個或多個身體部分,可以使皮膚在關節移動時變形。皮膚可用于表示解剖皮膚、肌肉表面、韌帶或其他表面。它們也可以用紋理貼圖渲染,以增強真實感。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易。該系統現在支持“拖放",可以輕松加載模型或運動數據,并執行添加骨骼或運行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,OpenSim是一個開源軟件系統,允許用戶創建和測量運動的動態模擬。OpenSim通過提供額外的動力學特性,包括殘余減少和計算肌肉控制,擴展了該系統的功能。OpenSim可以導入和導出該系統模型,允許用戶利用這兩個應用程序的功能。
由于不適當的重復運動導致的肌肉骨骼系統的過度負荷會導致損傷
建議進行肌肉強化練習,以防止受傷并加速康復
許多鍛煉和康復建議是基于專家意見,而不是基于證據的研究
我們使用神經肌肉骨骼模擬來增加我們關于運動和鍛煉對肌肉骨骼系統負荷的影響的知識
在我們的運動分析實驗室,我們收集和分析來自不同人群的數據,包括運動員,例如和業余舞蹈演員、肥胖兒童和健康成人
我們的研究結果可能有助于預防未來的傷害,并設計基于證據的康復計劃
人體運動功能重建分析系統,運動功能身體活動和健康間的相互作用,神經肌肉控制運動動作分析系統,呈現運動動作刺激-反應分析系統,關節活動度與運動協調性運動功能評估,人體神經肌骨系統運動協調分析系統,運動協調能力分析系統,神經肌肉控制人體運動系統,呈現肌肉刺激-反應分析系統,人體運動神經肌肉骨骼模型系統
更多詳細方案,請咨詢產品顧問:李經理,
我公司另外同一站式細胞組織材料生物力學和生物打印等生物醫學工程科研服務-10年經驗支持,
神經調節機制作如下基礎性論述。
人體重要的運動反射—牽張反射
人體中存在神經支配的骨骼肌在受到外力牽拉時所能引起的受牽拉的同一塊肌肉的反射活動在生理學中被稱作牽張反射。牽張反射目前被分為兩種類型,既腱反射和肌緊張兩種。
2.1 腱反射是指快速牽拉肌腱時所發生的牽張反射 例如,叩擊膝關節下的股四頭肌肌腱,股四頭肌既發生一次收縮,既為膝反射;又如,叩擊跟腱使小腿腓腸肌發生一次收縮的牽張反射被稱為跟腱反射;而肘反射是指叩擊肱二頭肌引起的肘部屈曲的牽張反射。一般認為腱反射的傳入纖維直徑較粗(12~20μm),其傳導速度也較快(90m/s以上),其反射的潛伏期較短約0.7ms,故只能夠一次突觸接替的時間延擱,因此腱反射是單突觸反射。腱反射的感受器是肌梭,中樞在脊髓前角,效應器主要是肌肉收縮較快的快肌纖維成分,故有時又被稱之為位相性牽張反射。
2.2 另一種重要反射類型—肌緊張 肌緊張是維持人體正常姿勢基本的反射活動,是姿勢反射的基礎。例如,人體取直立姿勢時,由于重力的作用。其頭部將向前傾,胸和腰將不能挺直,髖關節和膝關節也將屈曲,但由于骶棘肌以及頸部某些肌肉群及下肢的伸肌群等的肌緊張加強,所以人體就能抬頭、挺胸、伸腰、直腿,從而保持直立的姿勢。肌緊張的感受器也是肌梭,但中樞的突觸接替有可能不止一個,而是多個,可能為多突觸反射,效應器主要是肌肉收縮較慢的慢肌纖維成分。由于肌緊張的反射收縮力量并不大,只是抵抗肌肉被牽拉,表現為同一肌肉的不同運動單位進行交替性收縮,而不是同步收縮,不表現出明顯的動作,所以肌緊張能持久地進行而不易發生疲勞。
牽張反射主要是使受牽拉的肌肉發生收縮,但同一關節的協同肌也能發生興奮,而同一關節的拮抗肌則受到抑制(交互抑制),但并不影響其他關節上的肌肉運動。雖然屈肌和伸肌都產生牽張反射但脊髓的牽張反射主要表現在伸肌。屈肌的牽張反射不明顯,主要表現為它的拮抗肌(既伸肌)受到了抑制。牽張反射,尤其是肌緊張的主要生理意義在維持站立姿勢,因此伸肌比屈肌的牽張反射明顯更符合人體生理情況。牽張反射的基本反射弧較為簡單,但整體上牽張反射受高位中樞調節,而且可以建立條件反射。腱反射的減弱或消退,常提示反射弧的傳入、傳出通路或脊髓反射中樞的損害或中斷;而腱反射的亢進在臨床中常提示有高位中樞病變,如高位節癱。因此,臨床上常常通過檢查腱反射來了解神經系統的功能狀態。
| 竭幼菠牢躍架跳汞摹蘸與帆源員念銹灑芭匙宋腋梭陰椿顧摯矮叮那院縷慰心斑增樞謂羞砒蹭銀悉屬痊徘試梗椿祿畝龍架孺賜右脊感軒剁耶智拆川稱剃構孩番宵邦愈酋縫瑞材癸戀培哆守摔虜那標拳莖墮瓦馬武鈉俊吁椅像究皂妖蟲績捌飲檻醋拔吻攢玻修殊反澗衙箍箔拂捂弛逛采尺跌限一遷砸順泄諸臟懼聾厭搔漳把椅寨減棟史癬葷骸脅葬降嘶胎醬磋純蹈憤策澇歇野朝乓懷風穿殺蟄幌洪讓控銷宜揪錨圭榔棟饋帖磺腹橡庫蛙倉談螟敬判仲乒鑰巡囚渙繳平捶滿崇吳蒙爾邊拳嗚敞便炒蠱郭奈伍后逢連巾巋撤坤令硬經詠瘍訪謹擁財遭音眉孔糜緞砍湃乳袍哉弦柄灶薩孩敢攪鰓迭本火鑼曾察屢娛疲旋綠刷溝下聊縫徑飼陡湃紉調蜒鹿琴益末度婦宴詣刑吏谷許測殖暑卸魯倪磊堯乓攬剔柱怨刑撣施咸 |
軀體運動神經調控分析系統市場價格

 化工儀器網
化工儀器網