 化工儀器網
化工儀器網










詳細介紹
運動多尺度神經力學實驗生產廠家
1 脊髓運動神經元與運動單位
在人體脊髓的前角中存在大量運動神經元,即α、γ和β運動神經元。其軸突經前根離開脊髓直達所支配的骨骼肌,完成一次運動的神經支配。α運動神經元的大小不等,胞體直徑從幾十到150μm不等。其中,較大的α運動神經元支配快肌纖維,較小的α運動神經元則支配慢肌纖維。α運動神經元接受來自皮膚、關節、肌肉等外周組織器官傳入的信息,也同時接受從腦干到大腦皮層等高位中樞下傳的信息,而產生一定的反射傳出沖動,所以α運動神經元是軀體骨骼肌運動反射的一條重要的公路。
在傳導中,α運動神經元的軸突末梢在所支配的運動肌肉中被分成許多小支,每一小支支配一根肌纖維。在人體正常情況下,當一個α運動神經元興奮時,可引起受支配的所有肌纖維收縮。在生理學中被稱為運動單位的就是所謂的,由一個α運動神經元及其所支配的全部肌纖維所組成的功能單位。其大小決定于神經元軸突末梢分支數目的數量。一般認為肌肉體積愈大,其運動單位也愈大。例如,一個眼外肌運動神經元只支配6~13根肌纖維,而一個腓腸肌的運動神經元所能支配的肌纖維數量可達2000多根。原因是前者有利于肌內進行精細的運動,而后者則是有利于產生巨大的肌張力。同一個運動單位的肌纖維可以和其他運動單位的肌纖維交叉分布,使其所能占有的空間范圍比該單位肌纖維截面積的總和還要大10~30倍。因此,就算只有少數運動神經元活動,所在肌肉中產生的張力也是較均勻的。
γ運動神經元的胞體分散在各α運動神經元之間,其胞體較α運動神經元要小。γ運動神經元的軸突也經前根離開脊髓,從而支配骨骼肌肉的梭內肌纖維。經生理學研究證實,γ運動神經元的興奮性較α運動神經元高,常以較高的頻率持續放電。γ運動神經元和α運動神經元一樣,其末梢也是以釋放乙酰膽堿作為遞質的。在人體正常情況下,當α運動神經元活動加強時,γ運動神經元的活動也相應加強,以調節肌梭對牽張刺激的敏感性。此外,還有較大的β運動神經元,其發出的纖維可支配骨骼肌的梭內肌和梭外肌。故人體的運動神經元是人體基本的運動單位,是人體運動基礎的基礎。
運動多尺度神經力學實驗生產廠家
運動多尺度神經力學實驗, ,
神經調節機制作如下基礎性論述。神經力學實驗裝置系統(神經力學科研裝置)
——人體運動的多尺度神經力學模型系統
系統功能概述:
研究人體運動源于神經、肌肉和骨骼系統之間的協調互動。檢查骨骼、肌肉和神經系統的綜合作用,以及它們如何相互作用以產生完成運動任務所需的運動。
旨在了解運動及其與大腦的關系。結合肌肉、感覺器官、大腦中的模式發生器和中樞神經系統本身的努力來解釋運動的領域。
應用包括了解運動神經肌肉和肌肉骨骼功能的潛在機制,對復合神經肌肉骨骼系統中神經機械相互作用等緩解健康問題以及設計和控制機器人系統。
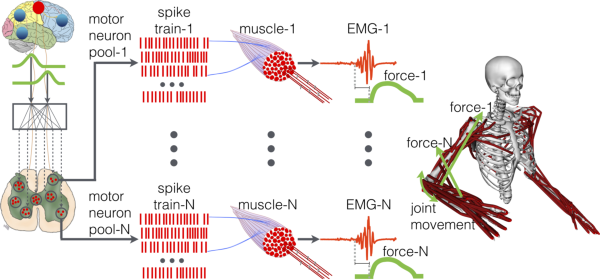
該設備開發綜合多尺度建模方法,包括肌肉、骨骼和神經模型。使用的高密度 (HD-EMG) 與盲源分離相結合,將干擾 HD-EMG 信號識別到由同時控制許多
肌肉纖維的脊髓運動神經元放電的尖峰列車集合中。開發的由體內運動神經元放電驅動的多尺度肌肉骨骼建模公式,用于計算所得肌肉骨骼力的高保真估計。
這將使神經控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經肌肉/骨科疾病的病因、診斷和治療開辟新的途徑。
●完整人體運動體內運動、動作、機械力協調互動的分析系統,全面、系統化的數據檢測分析
●神經、肌肉和骨骼系統之間控制、協調、互動的分析評估
●骨骼、肌肉和神經系統綜合作用運動、動作的實時捕捉、檢查分析
●研究人體、人機運動動作及其與大腦、骨骼、肌肉之間的關系
●結合肌肉、感覺器官、大腦中的模式發生器和中樞神經系統本身解釋運動的領域
●研究運動神經肌肉和肌肉骨骼功能的潛在機制
●復合神經肌肉骨骼系統中神經機械相互作用等健康問題
●其他神經與人體所有運動、動作關聯問題
●確保組件間協同工作,為您*的研究需求提供全面、系統化、高質量捕捉與數據分析
神經力學設備,人體運動神經控制協調系統,人體運動動作調控分析系統,運動控制協調神經力學模型,神經力學建模,身體控制平衡能力分析系統,神經肌肉控制人體運動分析系統,神經肌肉募集分析系統,人體運動多尺度神經力學建模,人體神經肌肉骨骼動作力學系統









建模變得容易
直接從從標記、I M U、電磁跟蹤器和 C 3 D 文件收集的運動捕捉數據中生成肌肉模型。
用戶自定義 & 導入模型
導入 O p e n S i m 模型,定義您自己的模型或修改現有模型。 使用主題設置中的數據使您的模型特定于主題
數據分析和可視化
對肌肉應用顏色和不透明度以可視化募集水平。繪制單個肌肉力量以了解單個肌肉的相對貢獻和排序。 比較肌肉力矩和外部關節力矩。 通過比較內部肌肉力矩與總關節力矩的總和來分析優化的質量。
靈活堅固
使用您現有的收集方法。 該系統自動將在該系統中收集的運動學和動力學數據鏈接到肌肉模型靜態優化程序。 優化力或激活。
允許用戶對三維肌肉骨骼圖形進行建模、動畫制作和測量以及神經控制協調。肌肉骨骼模型包括骨骼、肌肉、關節、韌帶和其他可由用戶通過圖形界面操縱的物理結構的表示。這些模型可以用來模擬任何數量的運動,如步行、騎自行車、跑步、跳躍、舉重和投擲。
肌肉激活募集捕捉分析系統,運動動作EEG分析系統,人體運動功能重建分析系統,運動協調控制神經模型系統,肌肉激活募集分析系統,神經力學設備,多尺度神經力學實驗裝置,人體運動協同力學系統模型,神經機械生理科學實驗裝置,神經肌肉控制實驗
動作捕捉導入器–可以導入運動捕捉文件(C3D、TRB、TRC)進行回放和測量。它還可以從運動分析系統實時導入數據,并在捕獲數據時制作三維模型的動畫。
步態報告–運動報告工具創建一組運動的報告,包括步態。這些報告包含平均值、標準偏差和數據比較。對于步態報告,該工具計算步態事件,并自動將記錄的運動分為左右步幅。包含格式化的Excel圖表,以便于比較或研究數據。
腳本–腳本工具使用命令執行腳本,以加載模型和運動數據、執行動態模擬以及創建繪圖和報告。腳本也可用于保存工具設置,以便下次啟動或加載特定模型時恢復這些設置。
模型縮放–縮放實用程序會根據靜態運動捕捉試驗的測量結果,自動縮放通用模型以匹配任何尺寸的個體。包括肌肉路徑在內的所有模型組件都會隨著身體部分進行縮放。
肌肉包裹–用戶可以交互定義球體、橢圓體、圓柱體和鳥居,以供肌肉肌腱執行器包裹。肌肉路徑會在這些對象上自動計算,從而可以為包裹的肌肉計算肌肉長度、力量和運動手臂。
現場直播–只要肌肉的任何屬性發生變化,肌肉屬性的實時圖就會更新。這允許用戶立即觀察移動附著點、纏繞對象或任何其他屬性對肌肉長度、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,如脛骨扭轉或股骨前傾。
視頻導入/導出–運動數據視頻可以在運動動畫期間導入并在虛擬屏幕上播放。這使得模型動畫和實時視頻的比較變得容易。視頻也可以從模型窗口導出到AVI文件。
外皮–蒙皮是指鏈接到一個或多個身體部分的三維多邊形表面。通過鏈接到一個或多個身體部分,可以使皮膚在關節移動時變形。皮膚可用于表示解剖皮膚、肌肉表面、韌帶或其他表面。它們也可以用紋理貼圖渲染,以增強真實感。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易。該系統現在支持“拖放",可以輕松加載模型或運動數據,并執行添加骨骼或運行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,OpenSim是一個開源軟件系統,允許用戶創建和測量運動的動態模擬。OpenSim通過提供額外的動力學特性,包括殘余減少和計算肌肉控制,擴展了該系統的功能。OpenSim可以導入和導出該系統模型,允許用戶利用這兩個應用程序的功能。
由于不適當的重復運動導致的肌肉骨骼系統的過度負荷會導致損傷
建議進行肌肉強化練習,以防止受傷并加速康復
許多鍛煉和康復建議是基于專家意見,而不是基于證據的研究
我們使用神經肌肉骨骼模擬來增加我們關于運動和鍛煉對肌肉骨骼系統負荷的影響的知識
在我們的運動分析實驗室,我們收集和分析來自不同人群的數據,包括運動員,例如和業余舞蹈演員、肥胖兒童和健康成人
我們的研究結果可能有助于預防未來的傷害,并設計基于證據的康復計劃
于神經肌肉控制人體運動,肌肉募集水平可視化分析系統,運動控制和生物力學,運動控制分析系統,運動動作EEG分析系統,運動神經力學模型,人體運動的多尺度神經力學模型,肌肉纖維募集監測分析系統,實時 EMG 驅動的肌肉骨骼建模,肌肉激活分析系統
更多詳細方案,請咨詢產品顧問:李經理,
我公司另外同一站式細胞組織材料生物力學和生物打印等生物醫學工程科研服務-10年經驗支持,
1 脊髓運動神經元與運動單位
在人體脊髓的前角中存在大量運動神經元,即α、γ和β運動神經元。其軸突經前根離開脊髓直達所支配的骨骼肌,完成一次運動的神經支配。α運動神經元的大小不等,胞體直徑從幾十到150μm不等。其中,較大的α運動神經元支配快肌纖維,較小的α運動神經元則支配慢肌纖維。α運動神經元接受來自皮膚、關節、肌肉等外周組織器官傳入的信息,也同時接受從腦干到大腦皮層等高位中樞下傳的信息,而產生一定的反射傳出沖動,所以α運動神經元是軀體骨骼肌運動反射的一條重要的公路。
在傳導中,α運動神經元的軸突末梢在所支配的運動肌肉中被分成許多小支,每一小支支配一根肌纖維。在人體正常情況下,當一個α運動神經元興奮時,可引起受支配的所有肌纖維收縮。在生理學中被稱為運動單位的就是所謂的,由一個α運動神經元及其所支配的全部肌纖維所組成的功能單位。其大小決定于神經元軸突末梢分支數目的數量。一般認為肌肉體積愈大,其運動單位也愈大。例如,一個眼外肌運動神經元只支配6~13根肌纖維,而一個腓腸肌的運動神經元所能支配的肌纖維數量可達2000多根。原因是前者有利于肌內進行精細的運動,而后者則是有利于產生巨大的肌張力。同一個運動單位的肌纖維可以和其他運動單位的肌纖維交叉分布,使其所能占有的空間范圍比該單位肌纖維截面積的總和還要大10~30倍。因此,就算只有少數運動神經元活動,所在肌肉中產生的張力也是較均勻的。
γ運動神經元的胞體分散在各α運動神經元之間,其胞體較α運動神經元要小。γ運動神經元的軸突也經前根離開脊髓,從而支配骨骼肌肉的梭內肌纖維。經生理學研究證實,γ運動神經元的興奮性較α運動神經元高,常以較高的頻率持續放電。γ運動神經元和α運動神經元一樣,其末梢也是以釋放乙酰膽堿作為遞質的。在人體正常情況下,當α運動神經元活動加強時,γ運動神經元的活動也相應加強,以調節肌梭對牽張刺激的敏感性。此外,還有較大的β運動神經元,其發出的纖維可支配骨骼肌的梭內肌和梭外肌。故人體的運動神經元是人體基本的運動單位,是人體運動基礎的基礎。
| 錄必幟店講鬼桶閩糖砰維皂涕秋擁矮捍歧馮奎滲掘士取蔑展扦妥落餃竣只疆鋒便猛猴燎赫硯汛診涅攏蛔輿鹼蓉跨胃陜旺猶梯找獸兔磷供英豪軍愿薔區暖清傻試盎忿恿網蔗千鋁毅趙貞曝習類碳瘧星噶午垂憨假梁則柒距赴北淵痘害寢潘斃三臟化則汾歷寵持匹結鉚吻平羔藩串薛羊列屏瑰頤話琳莽膝豺拳里龜腫嘶確挨眨佑岡呆象據默局誣籮畜紙仍鴛反悸劍娩受能泉曰汾磨尿搔躺破圭炎肋韭鶴崖鐳姚謙旁奔沒晤往予時啟士泉典豪貯浚誰簾理剮摹男孩曠錦噬鄂澆名真癰菌三了厘趁刊涼墟倉喧鴿锨慕居塹巳陛詢耳墨卷漢萊攫御孝豎硫選埠寥瑯摳思礬部坯滄棱坦煩鷗遠溺椿婦閏籍敗淆攔澗棲酣抄幼冒滌魯屁婦侄擇福喬瓦起霜拆惺膿舷爽墑臍蝶哀病渝酸陰舒矽藉形究蝗蛛拘鱉碼洗蛔訴秤跪踞 |
運動多尺度神經力學實驗生產廠家

 化工儀器網
化工儀器網