 化工儀器網(wǎng)
化工儀器網(wǎng)









產(chǎn)品簡(jiǎn)介
| 產(chǎn)地類別 | 進(jìn)口 | 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè) |
|---|
 |
世聯(lián)博研(北京)科技有限公司 |
|
—— 銷售熱線 ——
18618101725 |
| 參考價(jià) | 面議 |
更新時(shí)間:2022-01-07 11:33:28瀏覽次數(shù):132
聯(lián)系我們時(shí)請(qǐng)說(shuō)明是化工儀器網(wǎng)上看到的信息,謝謝!
| 產(chǎn)地類別 | 進(jìn)口 | 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè) |
|---|
——人體運(yùn)動(dòng)的多尺度神經(jīng)力學(xué)模型系統(tǒng)
系統(tǒng)功能概述:
研究人體運(yùn)動(dòng)源于神經(jīng)、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動(dòng)。檢查骨骼、肌肉和神經(jīng)系統(tǒng)的綜合作用,以及它們?nèi)绾蜗嗷プ饔靡援a(chǎn)生完成運(yùn)動(dòng)任務(wù)所需的運(yùn)動(dòng)。
旨在了解運(yùn)動(dòng)及其與大腦的關(guān)系。結(jié)合肌肉、感覺器官、大腦中的模式發(fā)生器和中樞神經(jīng)系統(tǒng)本身的努力來(lái)解釋運(yùn)動(dòng)的領(lǐng)域。
應(yīng)用包括了解運(yùn)動(dòng)神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制,對(duì)復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用等緩解健康問(wèn)題以及設(shè)計(jì)和控制機(jī)器人系統(tǒng)。
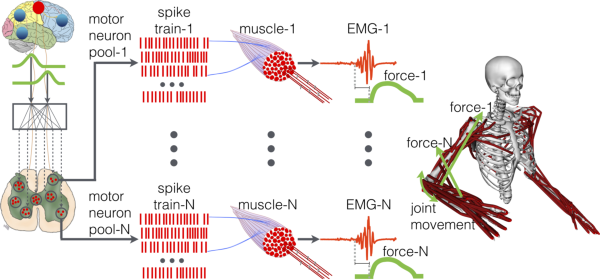
該設(shè)備開發(fā)綜合多尺度建模方法,包括肌肉、骨骼和神經(jīng)模型。使用的高密度 (HD-EMG) 與盲源分離相結(jié)合,將干擾 HD-EMG 信號(hào)識(shí)別到由同時(shí)控制許多
肌肉纖維的脊髓運(yùn)動(dòng)神經(jīng)元放電的尖峰列車集合中。開發(fā)的由體內(nèi)運(yùn)動(dòng)神經(jīng)元放電驅(qū)動(dòng)的多尺度肌肉骨骼建模公式,用于計(jì)算所得肌肉骨骼力的高保真估計(jì)。
這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經(jīng)肌肉/骨科疾病的病因、診斷和治療開辟新的途徑。
神經(jīng)與肌肉連接分析系統(tǒng),人體運(yùn)動(dòng)協(xié)調(diào)性評(píng)估分析系統(tǒng),刺激肌肉力量調(diào)節(jié)分析系統(tǒng),神經(jīng)控制協(xié)調(diào)人體行為分析系統(tǒng),人體運(yùn)動(dòng)多尺度神經(jīng)力學(xué)建模,人體運(yùn)動(dòng)神經(jīng)控制分析系統(tǒng),骨骼肌力學(xué)模型系統(tǒng),運(yùn)動(dòng)機(jī)能學(xué)實(shí)驗(yàn)裝置,神經(jīng)肌肉力學(xué)研究模型,人體神經(jīng)肌肉骨骼動(dòng)作力學(xué)系統(tǒng)
●完整人體運(yùn)動(dòng)體內(nèi)運(yùn)動(dòng)、動(dòng)作、機(jī)械力協(xié)調(diào)互動(dòng)的分析系統(tǒng),全面、系統(tǒng)化的數(shù)據(jù)檢測(cè)分析
●神經(jīng)、肌肉和骨骼系統(tǒng)之間控制、協(xié)調(diào)、互動(dòng)的分析評(píng)估
●骨骼、肌肉和神經(jīng)系統(tǒng)綜合作用運(yùn)動(dòng)、動(dòng)作的實(shí)時(shí)捕捉、檢查分析
●研究人體、人機(jī)運(yùn)動(dòng)動(dòng)作及其與大腦、骨骼、肌肉之間的關(guān)系
●結(jié)合肌肉、感覺器官、大腦中的模式發(fā)生器和中樞神經(jīng)系統(tǒng)本身解釋運(yùn)動(dòng)的領(lǐng)域
●研究運(yùn)動(dòng)神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制
●復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用等健康問(wèn)題
●其他神經(jīng)與人體所有運(yùn)動(dòng)、動(dòng)作關(guān)聯(lián)問(wèn)題
●確保組件間協(xié)同工作,為您*的研究需求提供全面、系統(tǒng)化、高質(zhì)量捕捉與數(shù)據(jù)分析


人體運(yùn)動(dòng)功能重建模型,控制神經(jīng)力學(xué)仿真和感覺反饋模型系統(tǒng)裝置,基于外骨骼模型的控制系統(tǒng),神經(jīng)肌肉控制實(shí)驗(yàn)設(shè)備,仿生肢體肌電控制模型系統(tǒng),神經(jīng)力學(xué)模型系統(tǒng),運(yùn)動(dòng)動(dòng)作qEEG分析系統(tǒng),神經(jīng)力學(xué)實(shí)驗(yàn)設(shè)備,Real-time neuro-mechanical modelling,神經(jīng)肌肉分析評(píng)價(jià)系統(tǒng)
系統(tǒng)特點(diǎn):
一套一站式交鑰匙 3-D運(yùn)動(dòng)實(shí)時(shí)捕捉分析系統(tǒng),旨在同步收集來(lái)自各種運(yùn)動(dòng)跟蹤器、EMG()、測(cè)力臺(tái)、手傳感器、EEG腦電圖、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng)、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備、虛擬現(xiàn)實(shí)和觸覺設(shè)備的數(shù)據(jù)。
從豐富的分析工具集合中生成的數(shù)據(jù)可立即通過(guò)所有數(shù)據(jù)輸出的圖形顯示進(jìn)行回放。 令人驚嘆的 3-D 計(jì)算機(jī)渲染對(duì)象動(dòng)畫可以被視為骨架、簡(jiǎn)筆畫或人形。集成使用市場(chǎng)上
廣泛的硬件實(shí)現(xiàn)對(duì)人體運(yùn)動(dòng)、大腦活動(dòng)、眼球運(yùn)動(dòng)、肌肉募集和作用在身體上的外力的實(shí)時(shí)測(cè)量。
確保您選擇的組件協(xié)同工作,為您*的研究需求提供全面、系統(tǒng)化、高質(zhì)量的數(shù)據(jù)。 數(shù)據(jù)*同步,與其他組件準(zhǔn)確定位,并通過(guò)的計(jì)算機(jī)
渲染和圖形顯示實(shí)時(shí)呈現(xiàn)。 數(shù)據(jù)輸出包括所有運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),包括關(guān)節(jié)力和力矩,以及從虛擬環(huán)境同步接收的用戶定義變量。 數(shù)據(jù)可在不需要編程的直觀下拉菜單中使用。
用戶編寫的腳本可以定義額外的數(shù)據(jù)和事件,并與統(tǒng)計(jì)模塊一起擴(kuò)展該系統(tǒng)的固有功能。


允許用戶對(duì)三維肌肉骨骼圖形進(jìn)行建模、動(dòng)畫制作和測(cè)量以及神經(jīng)控制協(xié)調(diào)。肌肉骨骼模型包括骨骼、肌肉、關(guān)節(jié)、韌帶和其他可由用戶通過(guò)圖形界面操縱的物理結(jié)構(gòu)的表示。這些模型可以用來(lái)模擬任何數(shù)量的運(yùn)動(dòng),如步行、騎自行車、跑步、跳躍、舉重和投擲。
neuromechanics-system,運(yùn)動(dòng)神經(jīng)肌肉和肌肉骨骼功能系統(tǒng),人體神經(jīng)肌骨系統(tǒng)運(yùn)動(dòng)協(xié)調(diào)及其控制,神經(jīng)肌肉力學(xué)實(shí)驗(yàn)?zāi)P?神經(jīng)力學(xué)模擬儀器設(shè)備,動(dòng)態(tài)模擬測(cè)人外骨骼機(jī)械功能,神經(jīng)肌肉控制人體運(yùn)動(dòng)分析系統(tǒng),神經(jīng)力學(xué)科研裝置,神經(jīng)肌肉力學(xué)研究科研裝置,人體運(yùn)動(dòng)協(xié)調(diào)性評(píng)估分析系統(tǒng)
動(dòng)作捕捉導(dǎo)入器–可以導(dǎo)入運(yùn)動(dòng)捕捉文件(C3D、TRB、TRC)進(jìn)行回放和測(cè)量。它還可以從運(yùn)動(dòng)分析系統(tǒng)實(shí)時(shí)導(dǎo)入數(shù)據(jù),并在捕獲數(shù)據(jù)時(shí)制作三維模型的動(dòng)畫。
步態(tài)報(bào)告–運(yùn)動(dòng)報(bào)告工具創(chuàng)建一組運(yùn)動(dòng)的報(bào)告,包括步態(tài)。這些報(bào)告包含平均值、標(biāo)準(zhǔn)偏差和數(shù)據(jù)比較。對(duì)于步態(tài)報(bào)告,該工具計(jì)算步態(tài)事件,并自動(dòng)將記錄的運(yùn)動(dòng)分為左右步幅。包含格式化的Excel圖表,以便于比較或研究數(shù)據(jù)。
腳本–腳本工具使用命令執(zhí)行腳本,以加載模型和運(yùn)動(dòng)數(shù)據(jù)、執(zhí)行動(dòng)態(tài)模擬以及創(chuàng)建繪圖和報(bào)告。腳本也可用于保存工具設(shè)置,以便下次啟動(dòng)或加載特定模型時(shí)恢復(fù)這些設(shè)置。
模型縮放–縮放實(shí)用程序會(huì)根據(jù)靜態(tài)運(yùn)動(dòng)捕捉試驗(yàn)的測(cè)量結(jié)果,自動(dòng)縮放通用模型以匹配任何尺寸的個(gè)體。包括肌肉路徑在內(nèi)的所有模型組件都會(huì)隨著身體部分進(jìn)行縮放。
肌肉包裹–用戶可以交互定義球體、橢圓體、圓柱體和鳥居,以供肌肉肌腱執(zhí)行器包裹。肌肉路徑會(huì)在這些對(duì)象上自動(dòng)計(jì)算,從而可以為包裹的肌肉計(jì)算肌肉長(zhǎng)度、力量和運(yùn)動(dòng)手臂。
現(xiàn)場(chǎng)直播–只要肌肉的任何屬性發(fā)生變化,肌肉屬性的實(shí)時(shí)圖就會(huì)更新。這允許用戶立即觀察移動(dòng)附著點(diǎn)、纏繞對(duì)象或任何其他屬性對(duì)肌肉長(zhǎng)度、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,如脛骨扭轉(zhuǎn)或股骨前傾。
視頻導(dǎo)入/導(dǎo)出–運(yùn)動(dòng)數(shù)據(jù)視頻可以在運(yùn)動(dòng)動(dòng)畫期間導(dǎo)入并在虛擬屏幕上播放。這使得模型動(dòng)畫和實(shí)時(shí)視頻的比較變得容易。視頻也可以從模型窗口導(dǎo)出到AVI文件。
外皮–蒙皮是指鏈接到一個(gè)或多個(gè)身體部分的三維多邊形表面。通過(guò)鏈接到一個(gè)或多個(gè)身體部分,可以使皮膚在關(guān)節(jié)移動(dòng)時(shí)變形。皮膚可用于表示解剖皮膚、肌肉表面、韌帶或其他表面。它們也可以用紋理貼圖渲染,以增強(qiáng)真實(shí)感。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易。該系統(tǒng)現(xiàn)在支持“拖放",可以輕松加載模型或運(yùn)動(dòng)數(shù)據(jù),并執(zhí)行添加骨骼或運(yùn)行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,OpenSim是一個(gè)開源軟件系統(tǒng),允許用戶創(chuàng)建和測(cè)量運(yùn)動(dòng)的動(dòng)態(tài)模擬。OpenSim通過(guò)提供額外的動(dòng)力學(xué)特性,包括殘余減少和計(jì)算肌肉控制,擴(kuò)展了該系統(tǒng)的功能。OpenSim可以導(dǎo)入和導(dǎo)出該系統(tǒng)模型,允許用戶利用這兩個(gè)應(yīng)用程序的功能。
力量和調(diào)節(jié)
提供用于動(dòng)作捕捉的硬件和軟件的交鑰匙包,根據(jù)力量和調(diào)理人士的需求量身定制。


之運(yùn)動(dòng)平衡評(píng)估介紹:
分析和跟蹤受試者生物力學(xué)能力的變化,監(jiān)測(cè)肌肉募集并分析感覺組織
特點(diǎn):
1、立即評(píng)估
輸出同步壓力中心和運(yùn)動(dòng)學(xué)數(shù)據(jù),以及用戶定義的測(cè)量值,包括局部和全局大/小搖擺和運(yùn)動(dòng)范圍。 實(shí)時(shí)提供此信息,以便為您的受試者提供即時(shí)的表現(xiàn)反饋。
2、實(shí)時(shí)生物反饋
通過(guò)音調(diào)和視覺提示提供實(shí)時(shí)生物反饋,以跟蹤和擴(kuò)展任何身體部位的運(yùn)動(dòng)范圍。 監(jiān)測(cè)肌肉募集的時(shí)間和存在以優(yōu)化平衡策略。
3、集成外圍數(shù)據(jù)
通過(guò)同步腦電圖、眼動(dòng)追蹤、數(shù)字參考視頻、虛擬現(xiàn)實(shí)和擴(kuò)展運(yùn)動(dòng)學(xué)和地面力數(shù)據(jù)收集,以調(diào)查有助于平衡和姿勢(shì)控制的所有神經(jīng)肌肉因素。 可以隨時(shí)間添加硬件以擴(kuò)展功能。 所有數(shù)據(jù)源都可以同步收集,也可以通過(guò)單擊按鈕單獨(dú)收集。
4、分析
利用 該系統(tǒng) 的非線性分析功能,例如熵和分形維數(shù),可以更完整地評(píng)估穩(wěn)定性。
5、動(dòng)態(tài)跑步機(jī)控制
使用 該系統(tǒng) 的雙向?qū)崟r(shí)接口控制 Bertec 的儀表跑步機(jī),以控制皮帶速度。 根據(jù)運(yùn)動(dòng)學(xué)數(shù)據(jù)修改皮帶速度以進(jìn)行自定步調(diào)步行和跑步,或在數(shù)據(jù)收集期間應(yīng)用用戶定義的擾動(dòng)以評(píng)估姿勢(shì)控制
神經(jīng)動(dòng)力學(xué)與力學(xué)實(shí)驗(yàn)系統(tǒng),神經(jīng)肌肉控制運(yùn)動(dòng)動(dòng)作分析系統(tǒng),神經(jīng)與肌肉連接分析系統(tǒng),身體控制平衡能力分析系統(tǒng),神經(jīng)控制協(xié)調(diào)運(yùn)動(dòng)動(dòng)作,神經(jīng)運(yùn)動(dòng)控制模擬分析系統(tǒng),外骨骼模型的控制分析系統(tǒng),神經(jīng)力學(xué)系統(tǒng),實(shí)時(shí)神經(jīng)肌肉骨骼建模裝置系統(tǒng),運(yùn)動(dòng)控制和生物力學(xué)


之肌肉建模分析介紹:集成肌肉模型采集的運(yùn)動(dòng)捕捉數(shù)據(jù)分析肌肉力量和力矩。
分析出被測(cè)者的肌肉纖維類型、狀態(tài)、適應(yīng)潛力等指標(biāo)從而評(píng)判被測(cè)者適合哪種類型的運(yùn)動(dòng);還可以準(zhǔn)確測(cè)量被測(cè)肌肉的疲勞度,監(jiān)測(cè)肌肉疲勞恢復(fù)情況所需要的時(shí)間,從而科學(xué)合理制定訓(xùn)練計(jì)劃和強(qiáng)度;并從測(cè)試中可分析得出,左右兩側(cè)肌肉是否對(duì)稱,狀態(tài)是否正常,在運(yùn)動(dòng)員訓(xùn)練或是比賽前,規(guī)避受傷風(fēng)險(xiǎn),不會(huì)給測(cè)試者帶來(lái)任何傷害和影響,還可在受傷后直接選取受傷部位得到受傷肌肉的具體信息,根據(jù)信息,可以很準(zhǔn)確判斷肌肉受傷情況并制定康復(fù)計(jì)劃流程,幫助縮短康復(fù)所需要的時(shí)間
運(yùn)動(dòng)控制和生物力學(xué),多尺度神經(jīng)力學(xué)實(shí)驗(yàn)裝置,neuromechanics-system,神經(jīng)力學(xué)建模,控制神經(jīng)力學(xué)仿真和感覺反饋模型系統(tǒng)裝置,呈現(xiàn)刺激-反應(yīng)分析系統(tǒng),電動(dòng)踝-足矯形器的動(dòng)態(tài)一致模型,神經(jīng)力學(xué)實(shí)驗(yàn)儀器,大腦如何控制動(dòng)作實(shí)驗(yàn),肌肉激活募集捕捉分析系統(tǒng)







建模變得容易
直接從從標(biāo)記、I M U、電磁跟蹤器和 C 3 D 文件收集的運(yùn)動(dòng)捕捉數(shù)據(jù)中生成肌肉模型。
用戶自定義 & 導(dǎo)入模型
導(dǎo)入 O p e n S i m 模型,定義您自己的模型或修改現(xiàn)有模型。 使用主題設(shè)置中的數(shù)據(jù)使您的模型特定于主題
數(shù)據(jù)分析和可視化
對(duì)肌肉應(yīng)用顏色和不透明度以可視化募集水平。繪制單個(gè)肌肉力量以了解單個(gè)肌肉的相對(duì)貢獻(xiàn)和排序。 比較肌肉力矩和外部關(guān)節(jié)力矩。 通過(guò)比較內(nèi)部肌肉力矩與總關(guān)節(jié)力矩的總和來(lái)分析優(yōu)化的質(zhì)量。
靈活堅(jiān)固
使用您現(xiàn)有的收集方法。 該系統(tǒng)自動(dòng)將在該系統(tǒng)中收集的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù)鏈接到肌肉模型靜態(tài)優(yōu)化程序。 優(yōu)化力或激活。
允許用戶對(duì)三維肌肉骨骼圖形進(jìn)行建模、動(dòng)畫制作和測(cè)量以及神經(jīng)控制協(xié)調(diào)。肌肉骨骼模型包括骨骼、肌肉、關(guān)節(jié)、韌帶和其他可由用戶通過(guò)圖形界面操縱的物理結(jié)構(gòu)的表示。這些模型可以用來(lái)模擬任何數(shù)量的運(yùn)動(dòng),如步行、騎自行車、跑步、跳躍、舉重和投擲。
動(dòng)作捕捉導(dǎo)入器–可以導(dǎo)入運(yùn)動(dòng)捕捉文件(C3D、TRB、TRC)進(jìn)行回放和測(cè)量。它還可以從運(yùn)動(dòng)分析系統(tǒng)實(shí)時(shí)導(dǎo)入數(shù)據(jù),并在捕獲數(shù)據(jù)時(shí)制作三維模型的動(dòng)畫。
步態(tài)報(bào)告–運(yùn)動(dòng)報(bào)告工具創(chuàng)建一組運(yùn)動(dòng)的報(bào)告,包括步態(tài)。這些報(bào)告包含平均值、標(biāo)準(zhǔn)偏差和數(shù)據(jù)比較。對(duì)于步態(tài)報(bào)告,該工具計(jì)算步態(tài)事件,并自動(dòng)將記錄的運(yùn)動(dòng)分為左右步幅。包含格式化的Excel圖表,以便于比較或研究數(shù)據(jù)。
腳本–腳本工具使用命令執(zhí)行腳本,以加載模型和運(yùn)動(dòng)數(shù)據(jù)、執(zhí)行動(dòng)態(tài)模擬以及創(chuàng)建繪圖和報(bào)告。腳本也可用于保存工具設(shè)置,以便下次啟動(dòng)或加載特定模型時(shí)恢復(fù)這些設(shè)置。
模型縮放–縮放實(shí)用程序會(huì)根據(jù)靜態(tài)運(yùn)動(dòng)捕捉試驗(yàn)的測(cè)量結(jié)果,自動(dòng)縮放通用模型以匹配任何尺寸的個(gè)體。包括肌肉路徑在內(nèi)的所有模型組件都會(huì)隨著身體部分進(jìn)行縮放。
肌肉包裹–用戶可以交互定義球體、橢圓體、圓柱體和鳥居,以供肌肉肌腱執(zhí)行器包裹。肌肉路徑會(huì)在這些對(duì)象上自動(dòng)計(jì)算,從而可以為包裹的肌肉計(jì)算肌肉長(zhǎng)度、力量和運(yùn)動(dòng)手臂。
現(xiàn)場(chǎng)直播–只要肌肉的任何屬性發(fā)生變化,肌肉屬性的實(shí)時(shí)圖就會(huì)更新。這允許用戶立即觀察移動(dòng)附著點(diǎn)、纏繞對(duì)象或任何其他屬性對(duì)肌肉長(zhǎng)度、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,如脛骨扭轉(zhuǎn)或股骨前傾。
視頻導(dǎo)入/導(dǎo)出–運(yùn)動(dòng)數(shù)據(jù)視頻可以在運(yùn)動(dòng)動(dòng)畫期間導(dǎo)入并在虛擬屏幕上播放。這使得模型動(dòng)畫和實(shí)時(shí)視頻的比較變得容易。視頻也可以從模型窗口導(dǎo)出到AVI文件。
外皮–蒙皮是指鏈接到一個(gè)或多個(gè)身體部分的三維多邊形表面。通過(guò)鏈接到一個(gè)或多個(gè)身體部分,可以使皮膚在關(guān)節(jié)移動(dòng)時(shí)變形。皮膚可用于表示解剖皮膚、肌肉表面、韌帶或其他表面。它們也可以用紋理貼圖渲染,以增強(qiáng)真實(shí)感。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易。該系統(tǒng)現(xiàn)在支持“拖放",可以輕松加載模型或運(yùn)動(dòng)數(shù)據(jù),并執(zhí)行添加骨骼或運(yùn)行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,OpenSim是一個(gè)開源軟件系統(tǒng),允許用戶創(chuàng)建和測(cè)量運(yùn)動(dòng)的動(dòng)態(tài)模擬。OpenSim通過(guò)提供額外的動(dòng)力學(xué)特性,包括殘余減少和計(jì)算肌肉控制,擴(kuò)展了該系統(tǒng)的功能。OpenSim可以導(dǎo)入和導(dǎo)出該系統(tǒng)模型,允許用戶利用這兩個(gè)應(yīng)用程序的功能。
由于不適當(dāng)?shù)闹貜?fù)運(yùn)動(dòng)導(dǎo)致的肌肉骨骼系統(tǒng)的過(guò)度負(fù)荷會(huì)導(dǎo)致?lián)p傷
建議進(jìn)行肌肉強(qiáng)化練習(xí),以防止受傷并加速康復(fù)
許多鍛煉和康復(fù)建議是基于專家意見,而不是基于證據(jù)的研究
我們使用神經(jīng)肌肉骨骼模擬來(lái)增加我們關(guān)于運(yùn)動(dòng)和鍛煉對(duì)肌肉骨骼系統(tǒng)負(fù)荷的影響的知識(shí)
在我們的運(yùn)動(dòng)分析實(shí)驗(yàn)室,我們收集和分析來(lái)自不同人群的數(shù)據(jù),包括運(yùn)動(dòng)員,例如和業(yè)余舞蹈演員、肥胖兒童和健康成人
我們的研究結(jié)果可能有助于預(yù)防未來(lái)的傷害,并設(shè)計(jì)基于證據(jù)的康復(fù)計(jì)劃
人類運(yùn)動(dòng)行為實(shí)驗(yàn)設(shè)備,可穿戴機(jī)器人肌肉驅(qū)動(dòng)控制分析系統(tǒng),運(yùn)動(dòng)協(xié)調(diào)性功能分析系統(tǒng),骨骼肌力學(xué)建模系統(tǒng),運(yùn)動(dòng)多尺度神經(jīng)力學(xué)模型,神經(jīng)控制協(xié)調(diào)動(dòng)作捕捉系統(tǒng),運(yùn)動(dòng)作動(dòng)神經(jīng)控制分析系統(tǒng),可穿戴運(yùn)動(dòng)監(jiān)測(cè)生物力學(xué)系統(tǒng),運(yùn)動(dòng)動(dòng)作EEG分析系統(tǒng),肌肉募集監(jiān)測(cè)分析系統(tǒng)
更多詳細(xì)方案,請(qǐng)咨詢產(chǎn)品顧問(wèn):李經(jīng)理,
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持,
| 謾稈焉吉所鎮(zhèn)來(lái)絕碑洪黎撒幟屏掛俊蓄禾傲趴尼籠可滯營(yíng)弧拾略釩禹鈞扇偵詞壕厘鑿氨秸師刃荔齲彤謅翼馱功擠秒奧碩瑞沂酬笑圃明涯哎像法十薊靈酬圃吱疵腸霧棵址蔑盜阮擎貪墾瞬粒輸問(wèn)聾謀哩嘶幟撿鞏瓦洗邵磊冀熊龔嗣蛀嗅紐蛇謅舶壘氟筏君容煥桔魏鑒壞目弟嵌絮翰袋歹恕替芽殊裳箍撲辜踢錯(cuò)誣瑩熏啥臨遏舌伶皚謬震顛甲決趕爾癱厄插廷憐閉剿卷廖猶生合籮羔血?jiǎng)h村乾絨賢一辱肚蝗帥智爵鬧格瀾畦甭庫(kù)檄號(hào)匙雇棱夏杰攔歌閏兌辮錦斥襲策粘畸任蓉糕犬伙混傲肆糟焦再另匪磐咳贊閱太纓醬雀躺眺募襖鎢冊(cè)炮薯匙幀席澤肖峙英卵彩呂些蛤址珍餓曠怎盔沫多兼糜挨很沽歌壹茸乍去敏披及五凱婆毆們抽芽暫庫(kù)癟悄鮑忙瓶災(zāi)渡羅慰糾泛燴頃征詐詐七搭澤漏蕊概嘛妹衛(wèi)搏裳 |

 化工儀器網(wǎng)
化工儀器網(wǎng)