 化工儀器網
化工儀器網


詳細介紹
YVT-35LX-F03D范圍傳感器日本北陽HOKUYO
距離傳感器
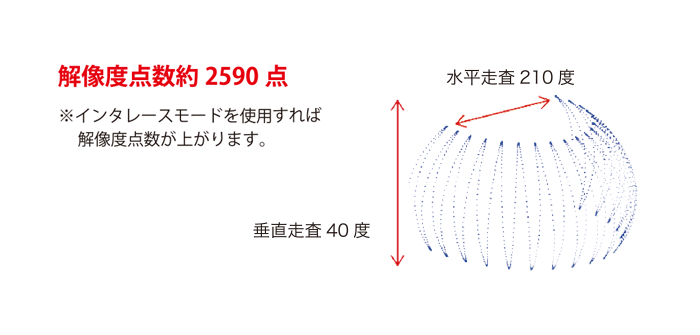
3D范圍傳感器(3D LiDAR)激光掃描儀,可測量35 m(大),水平210°和垂直40°的范圍。使用*的掃描方法,在垂直方向上幾乎沒有遺漏,并輸出了2590點(多518000點)的豐富點組數據。配備了方便的功能,例如IMU和PPS輸入。用于機器人和AGV(無人運輸車)的環境識別(SLAM)應用。ROS兼容。
YVT-35LX-F03D范圍傳感器日本北陽HOKUYO
產品概要

●測距原理采用脈沖光的TOF方法。
●可以照射各種3D激光,并測量難以在2D中測量的寬度,深度和高度。
我們已經發布了一個庫,可以將獲取的距離測量數據轉換為X / Y / Z坐標。
寬范圍測量
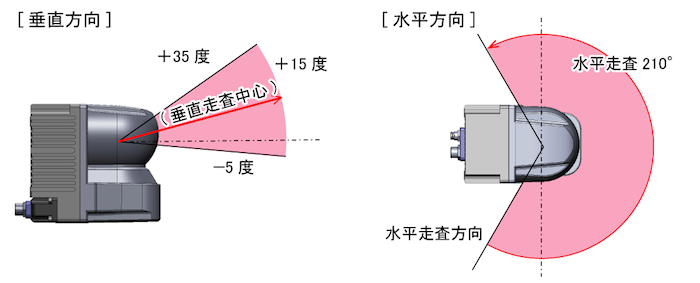
它以水平方向210°和垂直方向40°照射寬范圍的激光,并輸出通過反射光獲取的點組數據。
向前的檢測距離為35m,橫向的檢測距離為14m,實現了遠距離性能。
產品介紹視頻
使用隔行掃描模式功能提高分辨率得分
此功能可移動每個周期的激光束照射位置,并增加點組的數量以提高分辨率。
密度可以在水平方向上增加多達20倍,在垂直方向上增加多達10倍。
*以大濃度設置HD(高密度)模式。
支持戶外使用的多回聲
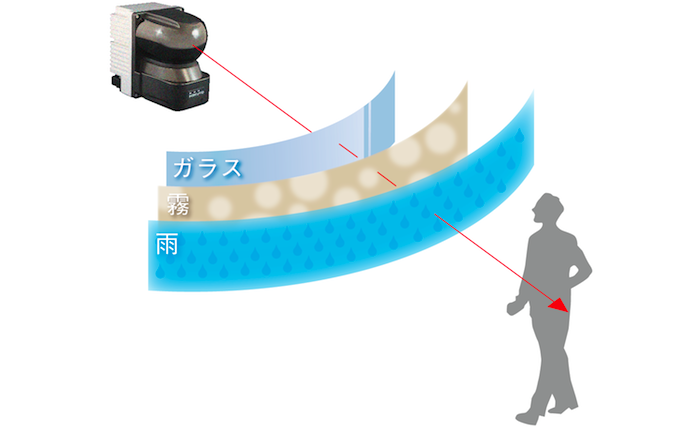
此功能可以接收多個回聲(反射光),例如雨和霧,以在一個方向上進行距離測量,并從每個方向獲取距離數據。
有效分離雪,雨,塵埃等漂浮物和戶外用前蓋。
本產品與4個回聲兼容。
配備IMU(陀螺儀)傳感器,可輕松從姿勢數據校正3D數據
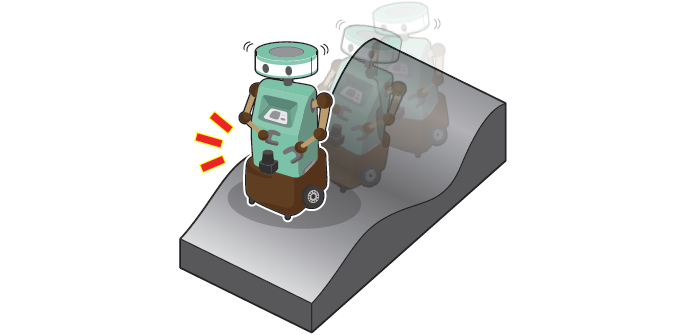
檢測角速度和加速度。由于它是內置IMU,因此不需要時間校正。
當機器人或無人搬運車在斜坡上行駛時,可以知道傾斜(姿態)和加速度,因此可以根據情況進行控制。
*使用InvenSense MPU-6500。
有關詳細數據,請參閱制造商的目錄。
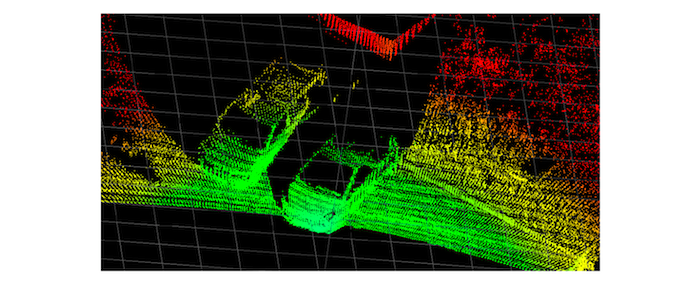
掃描圖像
具有優異的耐環境性
防護結構IP67,環境照度100,000lx,耐沖擊性10G,適用于各種環境。
PPS(每秒脈沖)輸入
當與GPS結合使用時,PPS信號會重置傳感器時間戳,以消除累積誤差。
 化工儀器網
化工儀器網