 化工儀器網
化工儀器網


詳細介紹
進口日本不二越NACHI超速機器人*
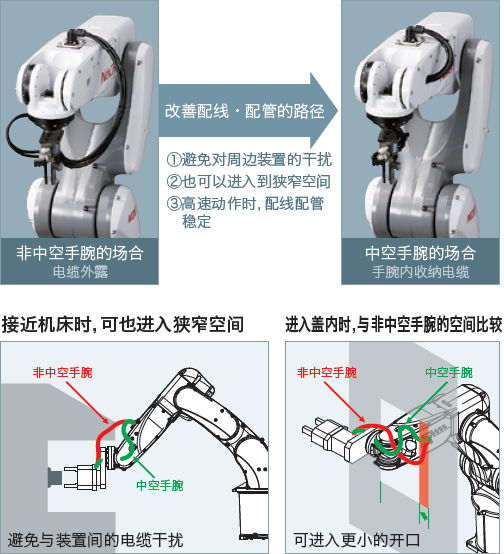
中空手腕的巧妙電纜排線
通過中空結構的手腕*智能地對機械手電纜進行配線。通過簡潔的穿插配線防止與周圍的裝置干擾,設備的可靠性大幅提高。
緊湊,寬大的動作范圍
輕量緊湊型機械手使設備更加簡單,為省空間化做出了貢獻。MZ04進一步追求緊湊性。設置面積是MZ07的一半(A5紙大小)。
zui高級別的動作速度,提高生產率
采用輕型機械手及的控制技術,實現了同級別zui快的動作性能。提高了生產性。
進口日本不二越NACHI超速機器人*
小型超速機器人 MZ04/MZ04E
外形精煉平滑

采用不容易積存塵埃,容易擦拭的設計。
巧妙的電纜布線
在中空手腕內抓手用的配線,配管可有序的收納
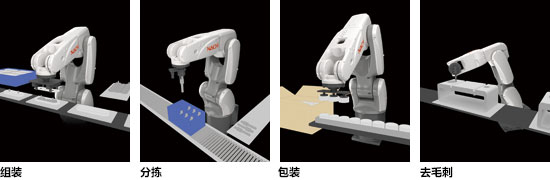
實例
小型超速機器人 MZ04/MZ04E
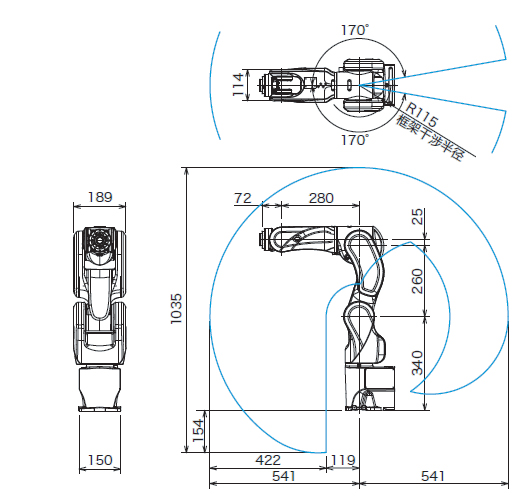
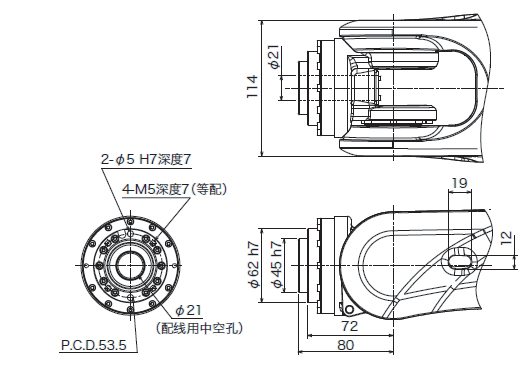
外形尺寸及動作范圍
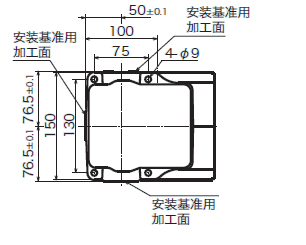
安裝圖
手腕詳情
(*1) 本產品的額定功率,規格,外部尺寸等如需改良而變更,恕不另行通告。
(*2) 如果本產品的zui后使用者與軍事相關,或用于兵器等的制造,可能成為“外匯及貿易管理法”規定的出口限制的對象。出口時,請進行充分的審查和辦理所需的出口手續。
小型超速機器人 MZ04/MZ04E
主體規格
| 機器人型號 | MZ04-01 (MZ04D-01) | MZ04E-01 ※3 (MZ04DE-01) | |||
|---|---|---|---|---|---|
| 關節數 | 6 | ||||
| 驅動方式 | AC伺服方式 | ||||
| zui大速度 [rad/s (°/s)] | 臂 | J1 | 旋回 | 8.38 (480) | 3.49 (200) |
| J2 | 前后 | 8.03 (460) | 2.62 (150) | ||
| J3 | 上下 | 9.08 (520) | 3.32 (190) | ||
| 手腕 | J4/J5 | 旋轉2/彎曲 | 9.77 (560) | ||
| J6 | 旋轉1 | 15.71 (900) | |||
| 可搬zhilianh [kg] | 4 | ||||
| 手腕容許靜 負荷扭矩 | J4/J5 | 旋轉2/彎曲 | 8.86 | ||
| J6 | 旋轉1 | 4.9 | |||
| 位置反復精度 ※2 | ±0.02mm | ||||
| 周圍溫度 [°C] | 0~45 | ||||
| 設置條件 | 地面安裝, 壁掛安裝, 傾斜安裝, 懸吊安裝 | 地面安裝, 懸吊安裝 | |||
| 主體zhi量 [kg] | 26 | 25 | |||
| zui大工作半徑 [mm] | 541 | ||||
| 耐環境性 | 相當于IP40 ※4 | ||||
1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
※2 依據JIS B8432
※3 在MZ04E/MZ04DE使用全軸80W以下的馬達。
※4 MZ04/MZ04E對應IP40;MZ04D/MZ04DE對應IP67(防塵防滴)。
控制裝置規格
| 標準控制軸數 | 6軸 |
|---|---|
| zui大控制軸數 | 7軸 |
| 程序選擇數 | 9,999種 |
| 存儲容量 | 256MB (相當于2,560,000) |
| 外部存儲器 | USB存儲器 |
| 外形尺寸 | 369(W) x 490(D) x 173(H) |
| 重量 | 約17kg |
| 電源規格 | 3相 AC200-230V ±10% 單相 AC200-230V ±10% |
| 消耗電力 | 0.4KVA |
| 保護等級 | IP20 |
| 周圍溫度 | 0~40°C |
| 周圍濕度 | 20~85% (無結露) |
詳情,請咨詢:日本不二越NACHI超速機器人
 化工儀器網
化工儀器網