















| 品牌 | 創拓科技 | 型號 | ROBOT3000 | 控制方式 | 自動 |
| 焊接原理 | 弧焊 | 焊接材質 | 金屬 | 保護氣體類型 | 二氧化碳 |
| 輸入電壓 | 220/380(V) | 頻率 | 50 | 額定輸入電源容量 | 30(KVA) |
| 空載輸出電壓 | 70(V) | 輸出電流調節范圍 | 350(A) | 引弧方式 | 自動 |
| 額定負載持續率 | 100(%) | 功率 | 25(W) | 效率 | 100 |
| 功率因素 | 085 | 可用焊絲直徑 | 1.2(mm) | 絕緣等級 | 3 |
| 外殼防護等級 | 3 | 外形尺寸 | 1 | 用途 | 焊接 |
| 頻段 | 50 | 焊咀對地電壓 | 70(mV) | 工具凈重 | 其它(Kg) |
產品介紹
創拓科技焊接機械手采用多功能型運動控制系統。該系統*的結合了高性能 ARM、DSP 和 FPGA 技術,可實現三軸/四軸/五軸連續軌跡插補運動、點位運動及豐富的輔助 IO 操作,適用于高速高精度連續軌跡運動、多點位運動、自動化生產線或非標自動化設備定制場合。該系統具有*的流水線自由配置功能及強大的客戶自定義功能。
功能簡介:
| 項目 | 規格說明 |
顯示方式 | 5 寸 TFT 高清液晶 |
編程方式 | 試教 |
文件生成 | 示教編程、USB 導入 、回讀控制卡文件 |
程序容量 | 內置存儲512M(可選配擴展 TF卡至 8G),可存儲 1000 文件,單文件zui大可容納 10000 個控制點 |
支持指令 | 運動指令:單點、直線、圓弧、整圓、曲線 圖形指令:圓、橢圓、跑道、矩形、封閉圖形可填充 控制指令:速度、延時、輸出/輸入IO(可控制氣缸)、暫停 文件指令:倒角、拉絲、陣列、連接、鎖定、回讀 |
通訊方式 | 自供電 USB2.0(480MHz),可支持 USB 導入/導出加工文件及系統配置文件 |
支持軸數 | X/Y/Z/R 軸,4/5 軸可插補運行;各軸可選擇電機或氣缸實現 |
操作簡單
人性化、圖形化設計,操作簡單易上手,有效提高工人效率及降低使用成本
產品穩定
專業硬件設計、多冗余的軟件系統、嚴格的出廠前老化及測試,確保了產品在惡劣環境下,依然能保持其一貫的穩定狀態。
運動控制性能*
采用帶速度前瞻的運動規劃算法,保證高精度的同時,又確保的運動的平穩性。
軸應用靈活
根據不同型號,可提供 3~5軸插補(XYZR),2個多用途輔助軸(可用于工件按相對坐標或坐標同步進給或旋轉)。
完善的加工工藝參數設置
設置文件倒角、筆畫前/后焊絲、起火延時、關槍暫停等工藝參數,可有效提高加工質量。
USB 導入/導出加工文件
可直接通過 U 盤導入 dxf 或 igs 文件。同時提供強大 PC 導圖工具,可實現線寬與加工速度掛鉤、多膠頭分配、線條使能/禁止、調整線條加工順序等功能。
中英文自由切換
示教盒操作語言可中英文自由切換
實時顯示加工圖形及當前坐標
主界面顯示加工圖形,在顯示圖形的基礎上實時顯示當前加工位置,加工過程一目了然。
文件預覽功能
在文件管理中,提供文件預覽功能,可快速查找需要的文件。在文件編輯過程中,通過預覽功能,可快速定位圖形中某條線段在指令列表中的位置,提高編程速度和效率。
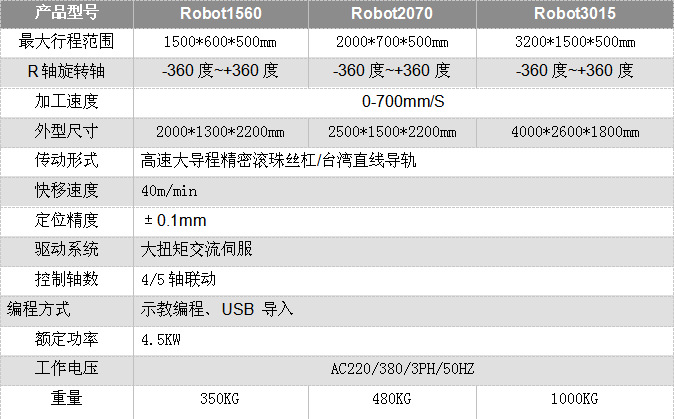
機器參數


 采購中心
采購中心
 化工儀器網
化工儀器網